{kind=link}
فهرست مطالب
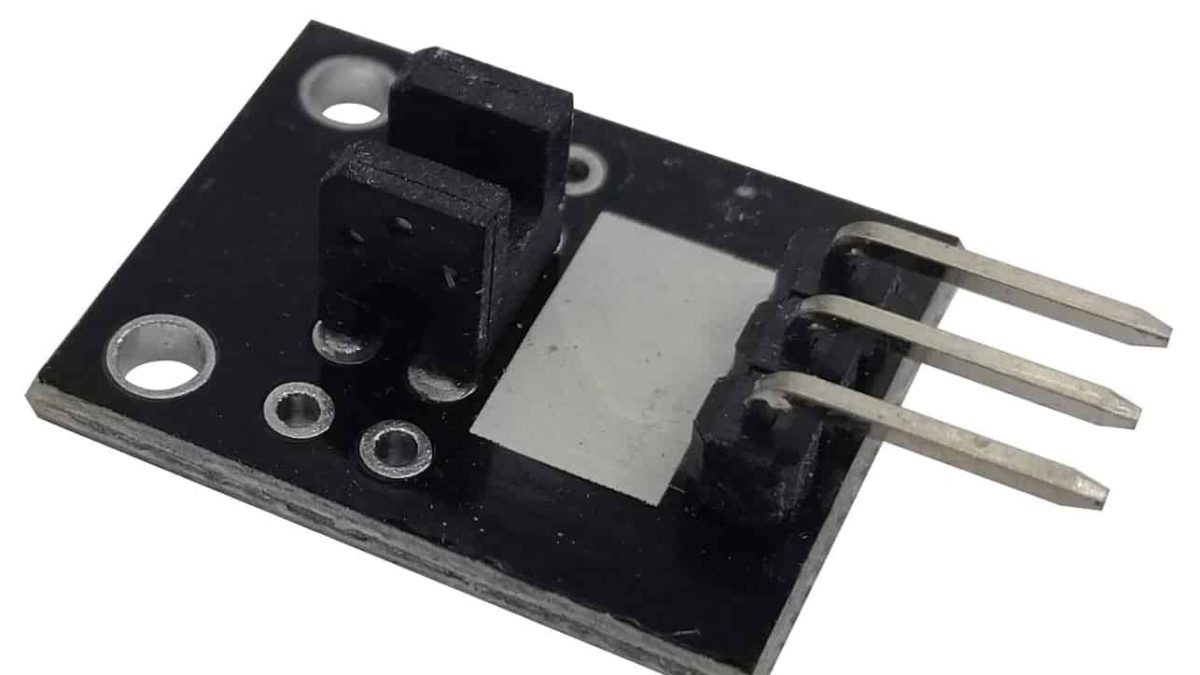
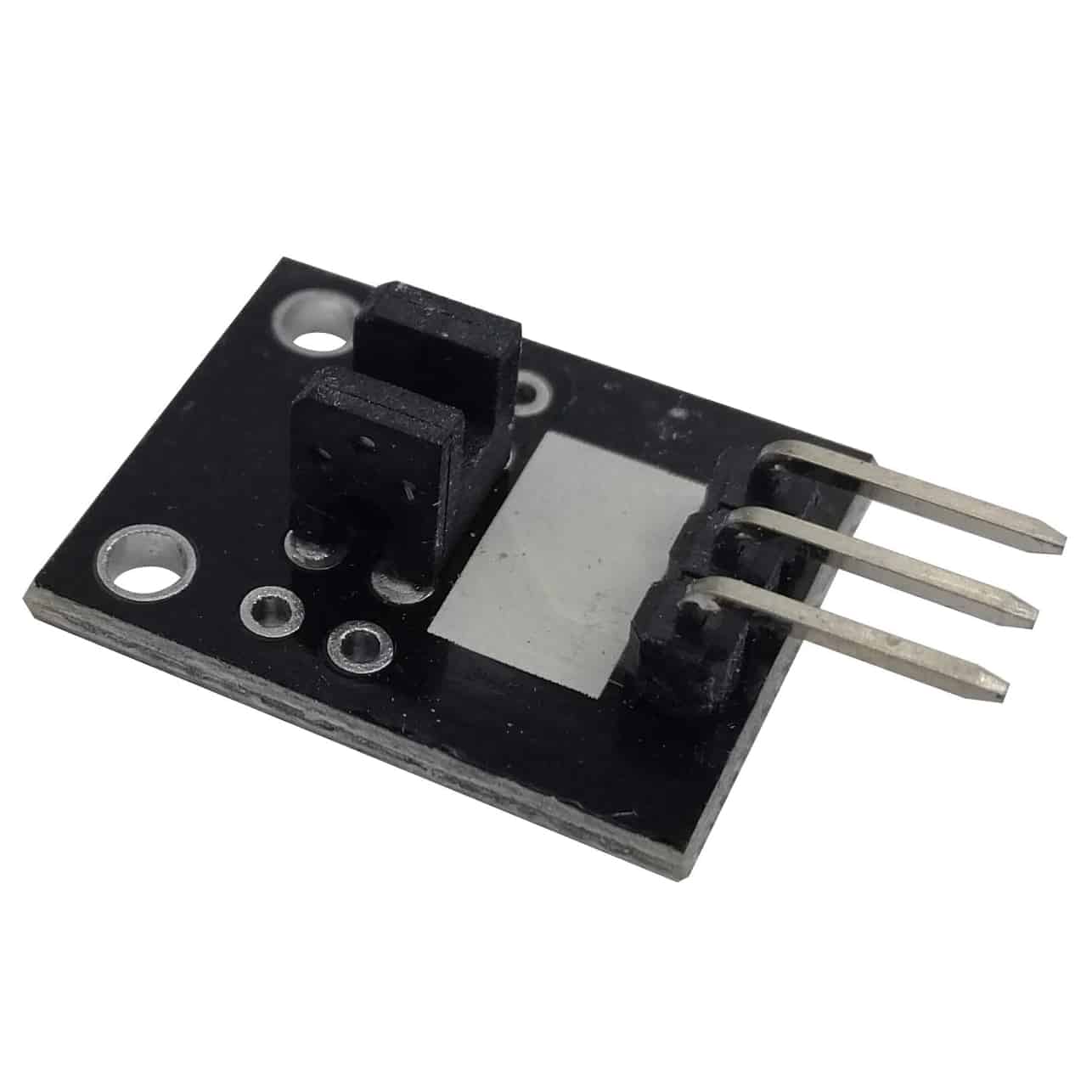
ماژول تشخیص مانع
ماژول تشخیص مانع برای آردوینو به این صورت عمل می کند که با عبور هر جسم غیر نوری، سیگنالی را ایجاد می کند و LED روشن می شود.
مشخصات فنی ماژول تشخیص مانع
این ماژول در قسمت جلویی یک نوع فتومیکروسنسور مدل EE-SX1103 (در داخل آن یک گیرنده نوری وجود دارد) و دو مقاومت (1 کیلو اهم و 33 اهم) در قسمت عقب دارد. این سنسور از یک پرتوی نوری و یک ردیاب برای بررسی اینکه مسیر عبور نور توسط یک شیء مات مسدود شده است یا خیر، استفاده می کند.
مشخصات در جدول زیر آمده است:

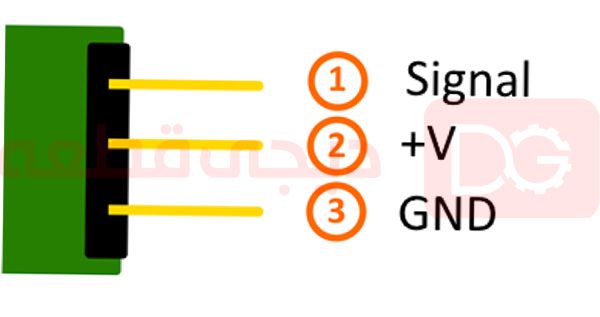
پایه های ماژول
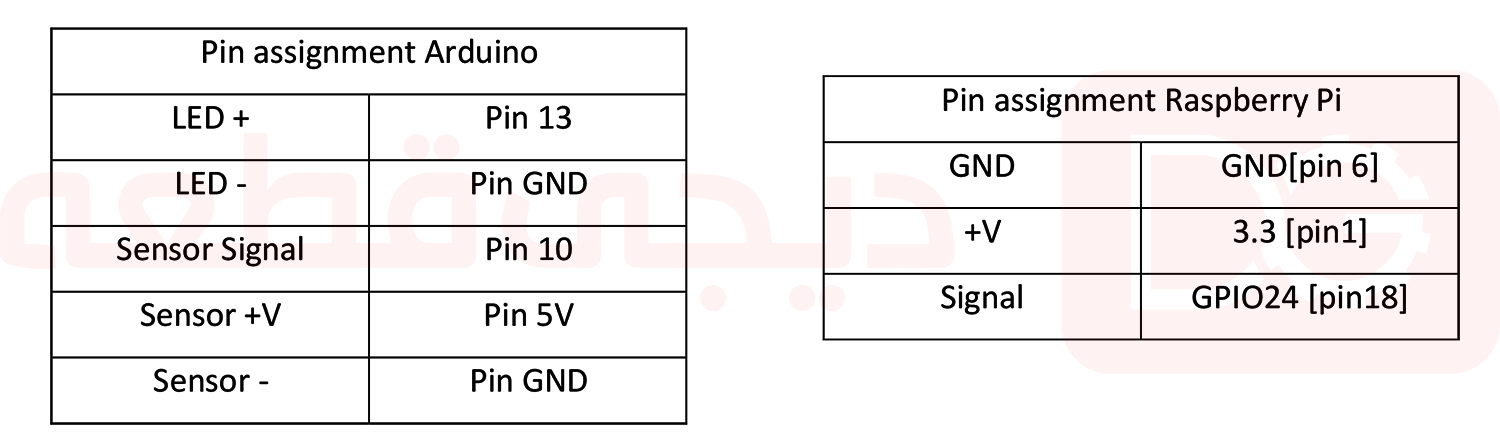
اتصال پایه ها در برد Arduino و Raspberry PI در جدول زیر آمده است:
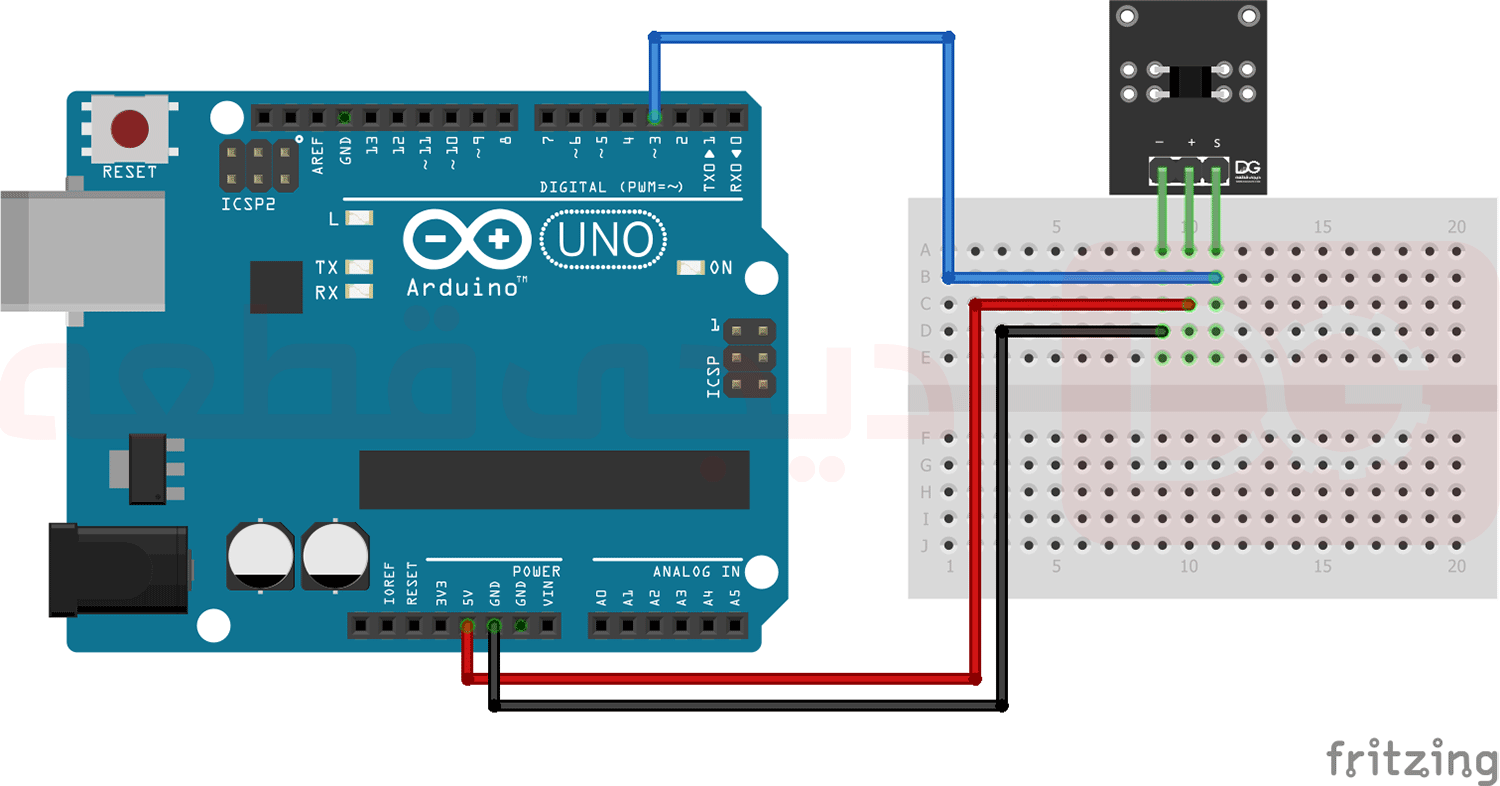
اتصال ماژول تشخیص مانع
پایه های مختلف ماژول را مطابق جدول بالا و به صورت آنچه در تصویر زیر مشاهده میشود به برد آردوینو متصل کنید.
نحوه راهاندازی ماژول تشخیص مانع با آردوینو
ما در این ویدیو به شما نشان میدهیم که چطور ماژول تشخیص مانع را میتوان توسط دیسکاوری بورد آردوینو uno راهاندازی کرد.
کدهای آردوینو مربوط به ماژول تشخیص مانع
در صورت وجود جسمي كه مانع پرتو نور بين فاصله سنسور شود ، LED (پين 13) را در Arduino روشن مي كند.
int Led = 13; // define LED pin
int buttonpin = 10; // define photo interrupter signal pin
int val; //define a numeric variable
void setup()
{
pinMode(Led, OUTPUT); // LED pin as output
pinMode(buttonpin, INPUT); //photo interrupter pin as input
}
void loop()
{
val=digitalRead(buttonpin); //read the value of the sensor
if(val == HIGH) // turn on LED when sensor is blocked
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
کدهای رزبری پای
# Needed modules will be imported and configured
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
# The input pin which is connected with the sensor.<br /># Additional to that the pull up resistor of the input will be activated.
GPIO_PIN = 24
GPIO.setup(GPIO_PIN, GPIO.IN, pull_up_down = GPIO.PUD_DOWN)
print "Sensor-Test [press ctrl+c to end the test]"
# This outputFunction will be started at signal detection
def outputFunction(null):
print("Signal detected")
# The outputFunction will be started at the moment of a signal detection (raising edge).
GPIO.add_event_detect(GPIO_PIN, GPIO.RISING, callback=outputFunction, bouncetime=100)
# Main program loop
try:
while True:
time.sleep(1)
# Scavenging work after the end of the program
except KeyboardInterrupt:
GPIO.cleanup()
