{kind=link}
در این پروژه، نشان میدهیم که چگونه میتوان کنترل سرعت موتور DC را با استفاده از آیسی 555 و پالس پهنای باند (PWM) پیادهسازی کرد.
فهرست مطالب
مقدمهای بر کنترل سرعت موتور
ما در بسیاری از سیستمها در زندگی روزمره از Motors DC استفاده میکنیم. به عنوان مثال، فنهای CPU، خاموشکنندههای بخاری، اتومبیلهای اسباببازی و غیره همه موتورهای DC هستند که با منبع تغذیه DC کار میکنند.
در بیشتر مواقع مجبور میشویم سرعت موتور را مطابق نیاز خود تنظیم کنیم. به عنوان مثال، CPU یک فن (پنکه) هنگام پردازش کارهای سنگین مانند بازیها یا ویرایش ویدیو، باید با سرعت بالا عمل کند. اما برای استفاده عادی مانند ویرایش اسناد، میتوان سرعت فن را کاهش داد.
اگرچه برخی سیستمها دارای سیستم تنظیم اتوماتیک برای سرعت فن هستند، اما همه سیستمها از این قابلیت برخوردار نیستند. بنابراین، ما مجبور میشویم گاهی اوقات سرعت موتور DC را تنظیم کنیم.
کنترل سرعت موتور DC
چندین روش برای تنظیم سرعت یک موتور DC به صورت دستی وجود دارد. سادهترین روش برای دستیابی به این امر با کمک یک مقاومت متغیر است یعنی میتوان سرعت یک موتور DC را با استفاده از یک مقاومت متغیر در سری با موتور تنظیم کرد. اما این روش معمولاً به دو دلیل مهیا نمیشود.
دلیل اول هدر رفتن انرژی است یعنی مقاومت انرژی اضافی را به عنوان گرما از بین میبرد. دلیل دوم این است که اگر بخواهیم از دستگاههایی مانند میکروکنترلرها یا سایر تجهیزات دیجیتالی برای کنترل خودکار سرعت موتور DC موتور خود استفاده کنیم، از این روش نمیتوان استفاده کرد.
یک روش کارآمدتر برای پیشبرد، استفاده از تکنیک (Pulse Width Modulation) مدولاسیون پهنای پالس برای کنترل سرعت موتور DC است. که در ادامه توضیح خواهیم داد.
اجزای موردنیاز کنترل سرعت موتور
- آی سی تایمر 555
- موتور DC 21 ولت
- 2 x 1N5819
- 1N4007
- 100nF
- 100pF
- مقاومت 21KΩ
- 211KΩ پتانسیومتر ماسفت IRF540
- بردبورد کوچک
- منبع تغذیه 21 ولت
- سیمهای اتصال
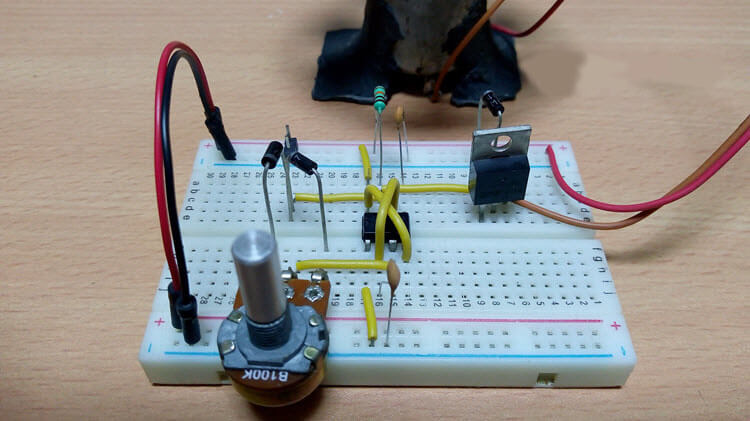
طراحی مدار
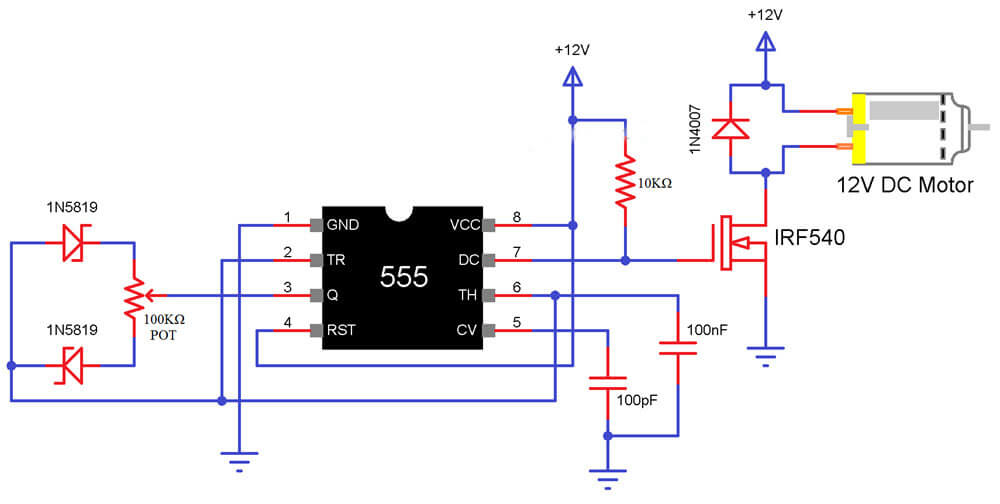
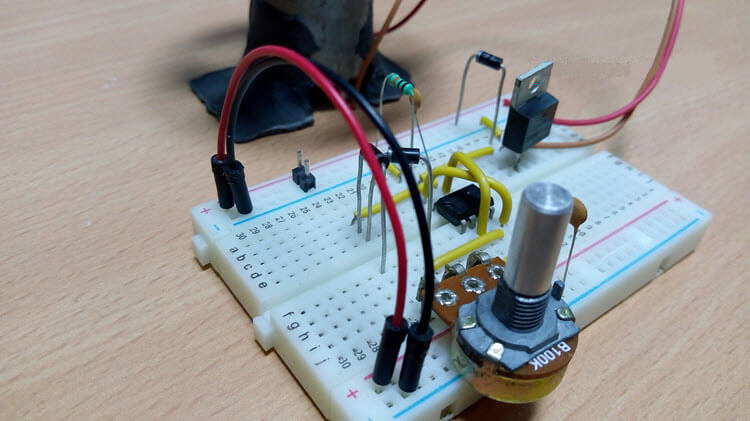
در اینجا قصد نداریم به توضیح نمودار پین از 555 IC بپردازیم و فرض میکنیم که شما قبلاً با آن آشنا هستید. در ادامهی طراحی مدار، پین 2 از 555 به GND متصل میشود. پینهای 8 و 4 به منبع تغذیه + 21 ولت وصل شدهاند. پینهای 6 و 1 کوتاه هستند و یک خازن 211 نانومتری بین پین 1 و GND متصل است. پین POT به پین 3 وصل شده است.
دو دیود N58192) Schottky) همانطور که در نمودار مدار نشان داده شده است به دو پین دیگر POT وصل میشوند. نقطه مشترک دیودها به پین 2 وصل شده است. پین 7 با کمک مقاومت 21KΩ بالا کشیده میشود. ترمینال گیت MOSFET به پین 7 از 555 وصل شده است. در حالی که منبع MOSFET به GND متصل است، موتور بین 21+ ولتاژ و درین MOSFET متصل شده است.
یک دیود اتصال PN در طول ترمینالهای موتور متصل شده است تا از نیروی محرکه الکتریکی پشت جلوگیری کند. نکته: در اینجا ما از دیودهای Schottky استفاده نکردهایم بلکه آنها را با دیودهای ساده 1N4007 جایگزین کردهایم زیرا فرکانس PWM کمتر است (در حدود 111 هرتز).
عملکرد کنترل سرعت مدار موتور DC
در این مدار، موتور DC توسط یک مدار یکپارچه 555 اداره میشود. IC 555 در این مدار در حالت (astable) ناپایدار عمل میکند، که پالسهای HIGH و LOW مداوم تولید میکند. در این حالت، از 555 IC میتوان به عنوان تعدیلکننده پهنای پالس (Pulse Width Modulation) با چند تنظیم کوچک در مدار استفاده کرد. فرکانس عملکرد مدار توسط پارامترهای غیرفعال مقاومتها و خازنهای متصل به آن تأمین میشود.
مدولاسیون پهنای پالس
- یکی از بهترین مواردی که در مورد این مدار وجود دارد این است که میتوانید آن را به عنوان یک مولتی ویبراتور ناپایدار با سختافزار کم و هزینه کمی ساخت، که میتواند هم در هزینه ساخت آن و هم در فضای موجود در برد مدار چاپی (PCB) صرفهجویی کند.
- اگر میخواهید یک تعدیلکننده پهنای پالس (Pulse Width Modulation) پیچیده داشته باشید که با دقت بیشتری کار کند و دارای قابلیت تنظیم بیشتری باشد، بهتر است از یک مدولاتور پهنای پالس (Pulse Width Modulation) مبتنی بر میکروکنترلر نسبت به روشی که اکنون استفاده میکنیم استفاده کنید.
- با این حال، مدار یا اپلیکیشن ای که ما از مدولاتور پهنای پالس (Pulse Width Modulation) استفاده میکنیم چندان حساس نیست و از این رو دقت زیادی را نمی طلبد. در چنین حالتی، مداری که با استفاده از IC 555 ساده استفاده میکنیم بهتر است زیرا باعث صرفهجویی در منابع پولی و همچنین فضایی در ساخت مدار میشود.
چرخه کار مدار را میتوان با تغییر مقدار پتانسیومتر تغییر داد. اگر چرخه کار را افزایش دهیم، سرعت موتور افزایش مییابد و اگر چرخه کار را کاهش دهیم، سرعت موتور کاهش مییابد.
