{kind=link}
در این ماژول بسته به زاویه، سوئیچ مدار را متصل می کند.
فهرست مطالب
مشخصات فنی ماژول سنسور شیب
ماژول ky-020 از یک مقاومت 10kΩ و یک سوئیچ دو طرفه تشکیل شده است که بسته به درجه شیب آن مدار را باز و بسته خواهد کرد.دقت کنید که این ماژول زاویه شیب را اندازه گیری نمی کند. مشخصات در جدول زیر امده است :

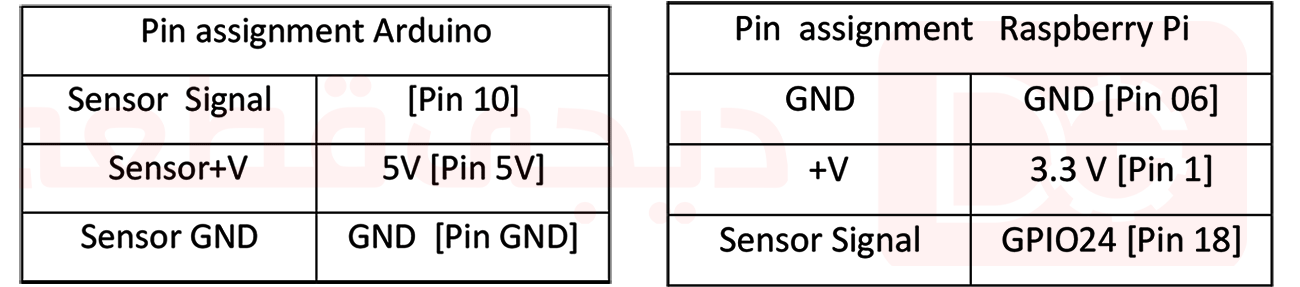
پایه های ماژول

اتصال پایه های ماژول در برد Arduino و Raspberry Pi در جدول های زیر آورده شده است:
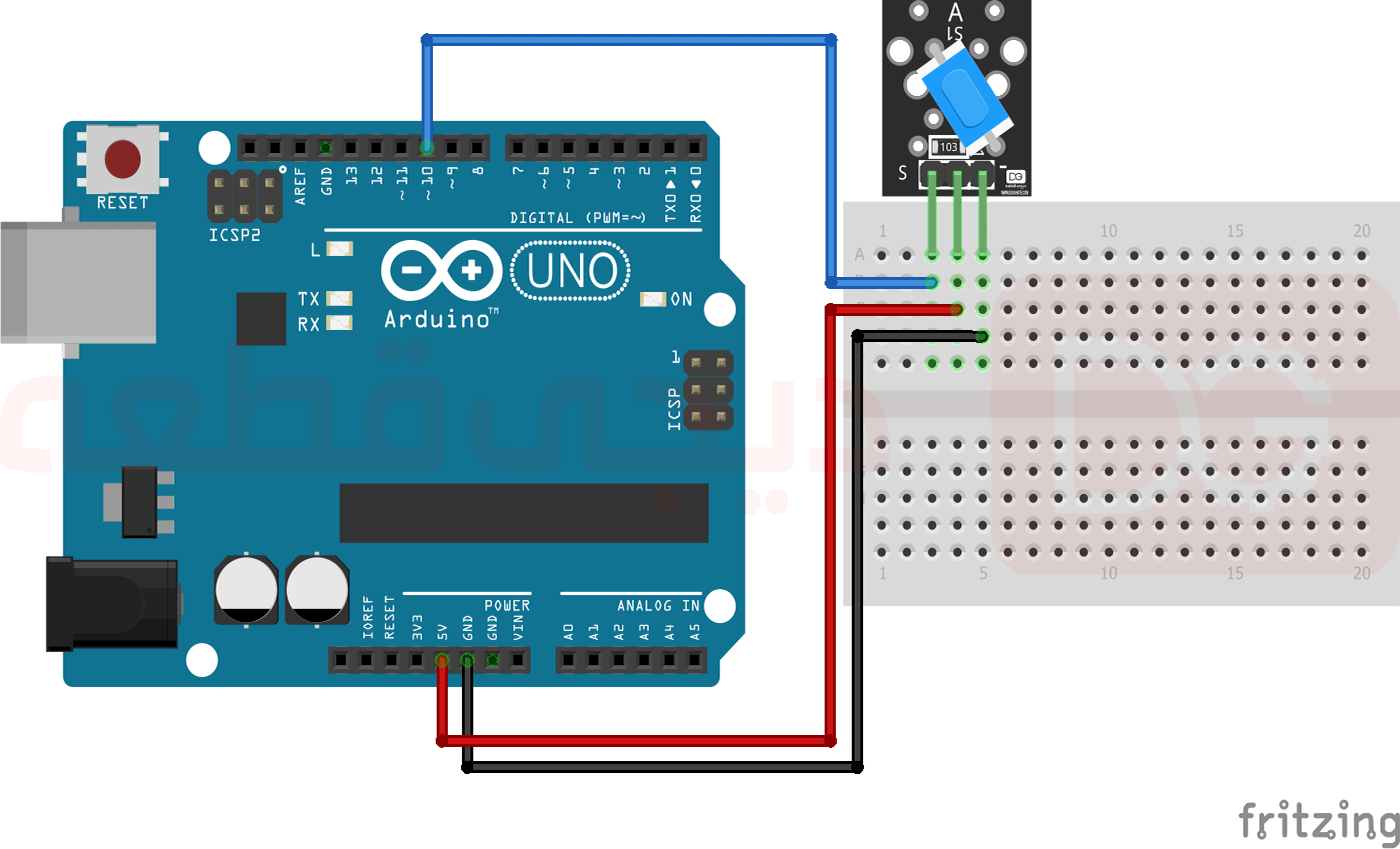
دیاگرام اتصالات
پایه های مختلف ماژول را مطابق جدول بالا و به صورت آنچه در تصویر زیر مشاهده میشود به برد آردوینو متصل کنید.
کدهای آردوینو
در صورت تشخیص ماژول در تغییر شیب، led را روی پین 13 برد اردوینو روشن می کند.
int tiltPin = 10; // pin number for tilt switch signal
int ledPin = 13; // pin number of LED
int tiltState = 0; // variable for reading the tilt switch status
void setup() {
pinMode(ledPin, OUTPUT); // set the LED pin as output
pinMode(tiltPin, INPUT); // set the tilt switch pin as input
}
void loop(){
// get the tilt switch state
tiltState = digitalRead(tiltPin);
// check if tilt switch is tilted.
if (tiltState == HIGH) {
digitalWrite(ledPin, HIGH);
}
else {
digitalWrite(ledPin, LOW);
}
}
کدهای رزبری پای
# Needed modules will be imported and configured
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
# Declaration of the input pin which is connected with the sensor.
GPIO_PIN = 24
GPIO.setup(GPIO_PIN, GPIO.IN)
print "Sensor-test [press ctrl+c to end]"
# This outFunction will be started at signal detection.
def outFunction(null):
print("Signal detected")
# The outFunction will be started after detecting of a signal (falling signal edge)
GPIO.add_event_detect(GPIO_PIN, GPIO.FALLING, callback=outFunction, bouncetime=100)
# Main program loop
try:
while True:
time.sleep(1)
# Scavenging work after the end of the program
except KeyboardInterrupt:
GPIO.cleanup()
