
سیستم های حلقه بسته از فیدبک در جایی که بخشی از سیگنال خروجی به ورودی برای کاهش خطاها و بهبود پایداری فیدبک شدهاند استفاده میکنند.
فهرست مطالب
سیستم حلقه بسته
سیستمها در جایی که کمیت خروجی دارای تاثیری بر ورودی به فرایند کنترل نیست، سیستمهای کنترل حلقه باز نامیده میشوند و آن سیستمهای حلقه باز دقیقا سیستمهایی بدون فیدبک و دارای انتهای باز هستند.
اما هدف هر سیستم کنترل الکتریکی و الکترونیکی اندازهگیری نمایش و کنترل یک فرایند است و یک روشی برای کنترل دقیق فرایند و نمایش خروجی آن و ” برگرداندن” آن به عقب برای مقایسه خروجی واقعی با خروجی مطلوب است و همچنین برای کاهش خطا و اگر اختلال داشت برگرداندن خروجی سیستم به عقب به پاسخ مطلوب یا اصلی است.
کمیت خروجی که اندازهگیری میشود “سیگنال فیدبک” نامیده میشود و نوع سیستم کنترل که از سیگنالهای فیدبک برای کنترل و تنظیم خود استفاده میکند یک سیستم حلقه باز نامیده میشود.
یک سیستم کنترل حلقه بسته، که نیز به عنوان یک سیستم کنترل فیدبک شناخته میشود سیستم کنترلی است که از مفهوم سیستم حلقه باز استفاده میکند زیرا که مسیر مستقیم آن دارای یک یا چند حلقه فیدبک (از این رو به این نام انتخاب شده) یا مسیرهایی بین خروجی و ورودی خود است. مرجع به ” فیدبک”، به سادگی این معنی را میرساند که بخشهایی از خروجی به “عقب” به ورودی برای تشکیل بخشی ازانفعال سیستمها برگردانده میشود.
سیستم های حلقه بسته، برای دستیابی خودکار و حفظ موقعیت خروجی مطلوب با مقایسه آن با موقعیت واقعی طراحی شده است. آن این را با تولید یک سیگنال خطا که بین خروجی و ورودی مرجع متفاوت است، انجام میدهد. در بیان دیگر، “سیستم های حلقه بسته”، یک سیستم کنترل خودکار کامل است بطوریکه عمل کنترل آن بر خروجی به طریقی وابسته است.
بنابراین به عنوان مثال، خشک کن لباس الکتریکی را از آموزش حلقه باز قبلی در نظر بگیرید. فرض کنید، ما از یک سنسور یا مبدل (قطعه ورودی) برای نمایش پیوسته دما یا خشکی لباسها استفاده میکنیم و یک سیگنال مربوط به خشکی را به عقب به کنترلکننده برمیگردانیم که در زیر نشان داده شده است.
کنترل حلقه بسته در سیستم های حقله بسته
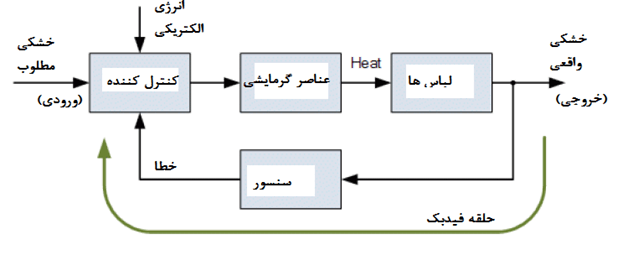
این سنسور خشکی واقعی لباسها را نشان خواهد داد و آن را با مرجع ورودی مقایسه خواهد کرد(یا تفریق از آن). سیگنال خطا (خطا= خشکی مورد نیاز-خشکی واقعی) توسط کنترلکننده تقویت شده است و خروجی کنترل کننده یک تصحیح ضروری را به سیستم گرمایشی برای کاهش هر گونه خطا فراهم میکند.
سیستم کنترل حلقه باز و بسته
اگر لباسها خیلی خیس باشند کنترلکننده ممکن است دما یا زمان خشک کردن را افزایش دهد. به همین ترتیب، اگر لباسها نزدیک خشک هستند آن ممکن است دما را کاهش دهد، یا فرایند را متوقف کند بنابراین بیش از حد داغ نمیشود و یا لباسها نمیسوزند.
سپس پیکربندی حلقه بسته، توسط سیگنال فیدبک مشخص شده است، که از سنسور در سیستم خشک کردن لباسها گرفته شده است. اندازه و قطبیت سیگنال خطا حاصل به صورت مستقیم به تفاوت بین خشکی مورد نیاز و واقعی لباسها مربوط خواهد شد.
همچنین، از آنجا که سیستم های حلقه بسته دارای برخی آگاهی از موقعیت خروجی است (از طریق سنسور) آن برای مدیریت هر گونه اختلال سیستم یا تغییرات در موقعیتها بهتر تجهیز شده است که ممکن است توانایی آن برای کامل کردن وظیفه مطلوب را کاهش دهد.
برای مثال، همانند قبل، در خشک کن باز میشود و گرما از بین میرود. این بار انحراف در دما توسط سنسور فیدبک آشکار میشود و کنترلکننده خطا را برای تامین یک دمای ثابت در محدودیتهای مقدار قبلی خود را تصحیح میکند. یا احتمالا فرایند را متوقف میکند و یک آلارم را برای آگاه کردن اپراتور فعال میکند.
همانطور که میتوان دید، در یک سیستم کنترل حلقه بسته، سیگنال خطا که تفاوت بین سیگنال ورودی و سیگنال فیدبک است (که ممکن است خود سیگنال خروجی یا یک تابعی از سیگنال خروجی باشد)، بنابراین به کنترلکننده برای کاهش خطا سیستمها و آوردن خرورجی سیستم به عقب به یک مقدار مطلوب در مثال ما خشکی لباسها بر میگردد. به طور شفاف، هنگامی که خطا صفر است لباسها خشک هستند.
تفاوت سیستم کنترل حلقه باز و حلقه بسته
اصطلاح کنترل حلقه بسته همیشه استفاده از عمل یک کنترل فیدبک برای کاهش هرگونه خطا در سیستم تاکید میکند و “فیدبک” آن تفاوتهای اصلی بین یک حلقه باز و یک سیستم حلقه بسته را متمایز میکند. درنتیجه دقت خروجی بر مسیر فیدبک وابسته است که در حالت کلی میتواند بسیار دقیق ساخته شود و در مدارها و سیستمهای الکترونیکی، کنترل فیدبک بسیار رایجتر از حلقه باز یا کنترل مستقیم فیدبک استفاده میشود.
سیستم های حلقه بسته دارای مزایای بیشتری از سیستمهای حلقه باز است. مزیت اولیه یک سیستم کنترل فیدبک حلقه بسته، توانایی آن برای کاهش حساسیت سیستم به اختلال بیرونی است برای مثال باز کردن در خشک کن یک کنترل مقاوم بیشتر به سیستم ارائه میکند به طوریکه هر گونه تغییرات در سیگنال فیدبک در جبران توسط کنترلکننده نتیجه میشود.
به عنوان مثال یخچال یک سیستم حلقه بسته است. دمای آن توسط یک ترموستات اندازه گیری می شود که وقتی دما از مقدار مورد نظر بالاتر رفت موتور را روشن می کند و وقتی دما دوباره به مقدار مورد نظر رسید موتور را خاموش می کند. نمونه ای از سیستم حلقه باز، توستر مبتنی بر تایمر است. نان داخل توستر گذاشته می شود، یک تایمر تنظیم می شود و یک اهرم به سمت پایین فشار داده می شود که به عنوان یک سوئیچ عمل می کند تا فرآیند شروع شود. این یک سیستم یک طرفه است که هیچ بازخوردی برای تغییر عملکرد دستگاه ندارد. در سیستم هر دو دستگاه، یعنی یخچال و توستر، از قطعات الکترونیکی و بردهای pcb یا همان برد مدار چاپی استفاده شده است که کارکرد آنها را امکان پذیر می سازد؛ بنابراین هنگام سفارش برد pcb برای این دستگاه ها حتما از قبل مطمئن شوید که بردی که خریداری می کنید متناسب با کدام سیستم (حلقه باز و حلقه بسته) است.
ویژگی های کنترل حلقه بسته
میتوان ویژگیهای اصلی کنترل حلقه بسته را به صورت زیر تعریف کرد:
- کاهش خطاها تنظیم خودکار ورودی سیستمها
- بهبود پایداری یک سیستم ناپایدار
- افزایش یا کاهش حساسیت سیستمها
- بهبود مقاومت در برابر اختلالات بیرونی به فرایند
- تولید یک عملکرد قابل اعتماد و قابل تکرار
از آنجایی که سیستم های حلقه بسته خوب میتواند دارای مزایای بیشتری در یک سیستم کنترل حلقه باز باشد، معایب اصلی آن این است که برای مهیا کردن میزان مورد نیاز کنترل، یک سیستم حلقه بسته با داشتن یک یا مسیرهای فیدبک بیشتر باید بسیار پیچیده باشد.
اگر بهره کنترلکننده برای تغییر در پاسخهای ورودی خود یا سیگنالها خیلی حساس باشد، آن میتواند ناپایدار شود و شروع به نوسان کند زیرا که کنترلکننده تلاش به تصحیح خود میکند و نهایتا چیزهایی میشکنند. بنابراین نیاز داریم تا به سیستم” بگوییم” که چگونه میخواهیم تا دربعضی محدودیتهای از پیش تعیین شده رفتار کنیم.
نقاط جمع حلقه بسته
برای یک سیستم فیدبک حلقه بسته برای تنظیم هرگونه سیگنال کنترل، ابتدا آن باید خطای بین خروجی واقعی و مطلوب را تعیین کند. این با استفاده از یک نقطه جمع به دست میآید همچنین به صورت یک عنصر مقایسهای بین حلقه فیدبک و ورودی سیستم عنوان میشود. این نقاط جمع کننده نقطه تنظیم سیستمها را با مقدار واقعی مقایسه میکند و یک سیگنال خطا منفی یا مثبت تولید میکند که همچنین کنترلکننده پاسخ میدهد. به طوریکه: خطا= نقطه تنظیم- واقعی
نماد استفاده شده برای نمایش یک نقطع جمعکننده در نمودار بلوک حلقه بسته استفاده به صورت یک دایره با دو خطوط متقاطع است. نقطه جمعکننده همچنین میتواند سیگنالها را به یکدیگر اضافه کند بطوریکه یک نماد جمع (+) استفاده شده برای نمایش اینکه قطعه “جمع کننده” است (برای فیدبک مثبت استفاده میشود) یا آن میتواند سیگنالها را از یکدیگر تفریق کند به طوریکه نماد منها (-) استفاده شده برای نشان دادن این است که قطعه” مقایسه کننده” است( برای فیدبک منفی استفاده شده) که در زیر نشان داده شده است.
انواع نقاط جمع کننده
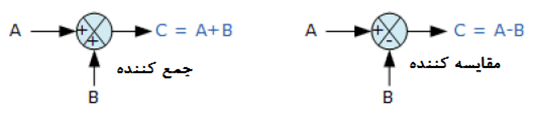
توجه داشته باشید که نقاط جمع میتوانند بیش از یک سیگنال به عنوان ورودی جمع یا تفریق اما تنها یک خروجی که جمع جبری ورودیها است داشته باشند. همچنین آرایهها نشاندهنده جهت سیگنالها است. نقاط جمع کردن میتوانند با یکدیگر سری شوند تا امکان جمع شدن متغیرهای ورودی بیشتر در نقطه داده شده را میدهد.
تابع انتقال سیستم های حلقه بسته
تابع انتقال هر سیستم کنترل الکتریکی و الکترونیکی یک رابطه ریاضی بین ورودی سیستمها و خروجی آن است و از این رو رفتار سیستم را توصیف میکند. توجه داشته باشید که نسبت خروجی یک قطعه خاص به ورودی آن بهره آن را نشان میدهد. سپس به طور صحیح میتوان گفت که خروجی همیشه تابع انتقال سیستم در ورودی است. سیستم های حلقه بسته زیر را در نظر بگیرید.
نمایش سیستم های حلقه بسته نوعی
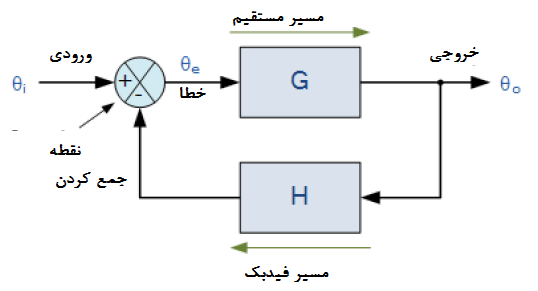
به طوریکه: بلوک G بهره های حلقه باز کنترلکننده یا سیستم را نشان میدهد و مسیر مستقیم است و بلوک H نشان دهنده بهره سنسور، مبدل یا سیستم اندازهگیری در مسیر فیدبک است.
برای یافتن تابع انتقال سیستم های حلقه بسته بالا، در ابتدا باید سیگنال خروجی θo در سیگنال ورودی θi محاسبه کرد. برای انجام این، به راحتی میتوان روابط نمودار بلوک داده شده را به صورت زیر نوشت.
خروجی سیستم برابر با : خروجی=خطا G× است.
توجه داشته باشید که سیگنال خطا θe نیز ورودی به بلوک تغذیه مستقیم : Gاست.
خروجی از نقطه جمع برابر با : خطا= ورودی -خروجی H× است.
اگر H=1 ( فیدبک یکپارچه) سپس:
خروجی از نقطه جمع برابر با : خطا (θe)= ورودی – خروجی خواهد بود.
حذف واژه خطا، سپس:
خروجی برابر است با : خروجی= (خروجی H×-ورودی) G×
درنتیجه: G ×ورودی= خروجی + خروجی G×H×
آرایش دوباره فوق تابع انتقال حلقه بسته زیر را به ما ارائه میدهد:
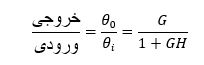
رابطه فوق برای تابع انتقال سیستم های حلقه بسته یک علامت جمع (+) در مخرج را نشان میدهد که نشاندهنده فیدبک منفی است. با یک سیستم فیدبک مثبت، مخرج دارای یک علامت منفی (-) خواهد بود و رابطه به صورت :1-GH میشود.
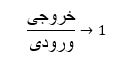
میتوان دید که زمانی که H=1 ( فیدبک یکپارچه) است و G بسیار بزرگ است، تابع انتقال به واحد به صورت زیر نزدیک میشود:
همچنین با کاهش بهره حالت ثابت سیستمها G، عبارت : G/(1+G) بسیار آهستهتر کاهش مییابد. در بیان دیگر، سیستم به تغییرات در بهره سیستمها که با نماد G نشان داده شده نسبتا غیر حساس است و یکی از مزایای یک سیستم حلقه بسته است.
سیستم های حلقه بسته چند حلقه
از آنجا که مثال ما در فوق یک سیستم حلقه بسته خروجی سیگنال و ورودی سیگنال است، تابع انتقال پایه همچنان به سیستمهای چند حلقهای پیچیدهتر اعمال میشود. بیشتر مدارهای فیدبک تجربی دارای بعضی اشکال کنترل چند حلقهای است و برای یک پیکربندی چند حلقهای تابع انتقال بین یک متغیر کنترلشده و به کار گرفته شده بر این که آیا حلقههای کنترل فیدبک باز یا بسته هستند، بستگی دارد.
سیستم چند حلقهای زیر را در نظر بگیرید.
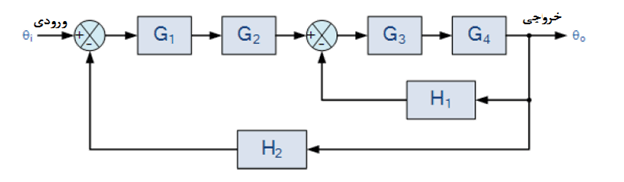
هر بلوک سری شده G1 و G2 میتواند کاهش یابد، همانند تابع انتقال حلقه داخلی زیر که نشان داده شده است.
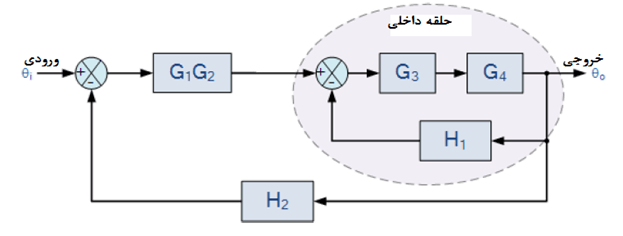
بعد از کاهش بیشتر بلوکها با یک نمودار بلوک نهایی خاتمه مییابیم که سیستم حلقه بسته تک حلقه قبلی را نشان میدهد.
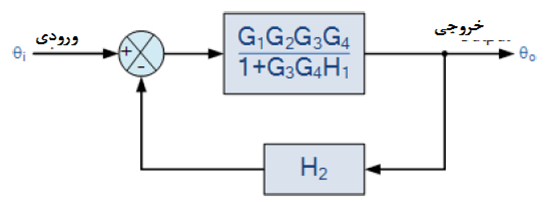
و تابع انتقال این سیستم چند حلقه به صورت زیر میشود:
کنترل موتور حلقه بسته در سیستم های حلقه بسته
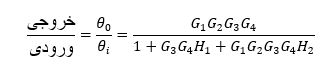
بنابراین چگونه میتوان از سیستمهای حلقه بسته در الکترونیک استفاده کرد. کنترلکننده موتور DC ما را از آموزش حلقه باز قبلی در نظر بگیرید. اگر یک مبدل اندازهگیری سرعت مانند یک تاکومتر را به شفت موتور DC وصل کنیم، میتوانیم سرعت آن را تشخیص دهیم و یک سیگنال متناسب با سرعت موتور به عقب به تقویت کننده فرستاد. یک تاکومتر، که نیز به عنوان مولد-تاکو شناخته میشود به سادگی یک مولد DC آهنربایی دائمی است که یک ولتاژ خروجی DC متناسب با سرعت موتور ارائه میدهد.
سپس موقعیت عقربه پتانسیومترها ورودی θi را نشان میدهد که توسط تقویتکننده (کنترل کننده) برای راه اندازی موتور DC در یک سرعت تنظیمی N که خروجی سیستم θo را نشان میدهد تقویت شده است و تاکومتر T یک حلقه بسته به کنترل کننده خواهد بود. تفاوت بین تنظیمات ولتاژ ورودی و سطح ولتاژ فیدبک سیگنال خطا را ارائه میکند که در زیر نشان داده شده است.
کنترل موتور حلقه بسته
هرگونه اختلال بیرونی به سیستم کنترل موتور حلقه بسته مانند افزایش بار موتورها یک تفاوتی در سرعت واقعی موتور و نقطه تنظیم ورودی پتانسیومتر بوجود خواهد آورد.
این تفاوت یک سیگنال خطا بوجود خواهد آورد که کنترلکننده به صورت اتوماتیک با تنطیم سرعت موتور پاسخ خواهد داد. سپس کنترلکننده برای کاهش سیگنال خطا کار خواهد کرد که خطای صفر نشان دهنده سرعت واقعی میباشد که معادل با نقطه تنظیم است.
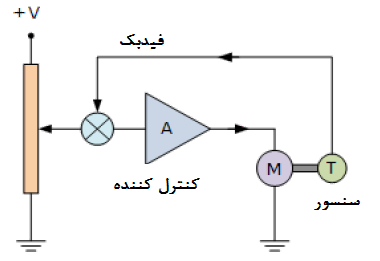
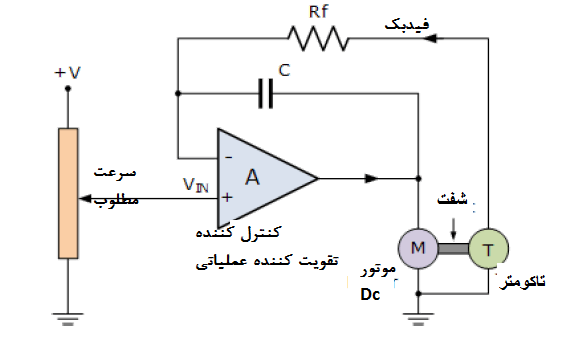
از نظر الکترونیکی، میتوان یک مدار کنترل موتور فیدبک –تاکومتر حلقه بسته ساده که یرای کنترلکننده از تقویتکننده عملیاتی استفاده میکند، به کاربرد که نشان داده شده است.
مدار کنترل کننده موتور حلقه بسته
این کنترلکننده موتور حلقه بسته میتواند به عنوان یک نمودار بلوک نشان داده شود.
نمودار بلوک برای کنترل کننده فیدبک در سیستم های حقله بسته
کنترلکننده موتور حلقه بسته یک روش معمول حفظ سرعت موتور مطلوب تحت شرایط بار متغیر با تغییر ولتاژ متوسط اعمال شده به ورودی از کنترلکننده است. تاکومتر می تواند توسط یک اینکدر نوری یا سنسور دوار یا موقعیتی اثر هال جایگزین شود.
خلاصه سیستم های حلقه بسته
دیدیم که یک سیستم کنترل الکترونیکی با یک یا مسیرهای فیدبک بیشتر یک سیستم حلقه بسته نامیده میشود. سیستمهای کنترل بسته که نیز “سیستمهای کنترل فیدبک ” نامیده میشوند در کنترل فرایند و سیستمهای کنترل الکترونیکی بسیار رایج هستند. سیستمهای فیدبک بخشی از سیگنال خروجی خود را به ورودی برای مقایسه با موقعیت نقطه تنظیم مطلوب” فیدبک” میکنند. نوع سیگنال فیدبک میتواند هم در فیدبک مثبت و هم در فیدبک منفی نتیجه شود.
در یک سیستم حلقه بسته، یک کنترلکننده برای مقایسه خروجی یک سیستم با موقعیت مورد نیاز استفاده میشود و تبدیل خطا به یک عمل کنترل برای کاهش خطا طراحی شده است و خروجی سیستم را به عقب به پاسخ مطلوب آورده است. سپس سیستمهای کنترل حلقه بسته از فیدبک برای تعیین ورودی واقعی به سیستم استفاده میکنند و میتوانند بیش از یک حلقه فیدبک داشته باشند.
سیستمهای کنترل حلقه بسته دارای مزایای زیادی در سیستمهای حلقه باز هستند. یک مزیت این حقیقت است که از فیدبک برای ایجاد پاسخ سیستم متناسبا حساس به اختلالات بیرونی و تغییرات درونی در پارامترهای سیستم مانند دما استفاده میکند. بنابراین میتوان از اجزای نسبتاً نادرست و ارزان استفاده کرد تا بتوان کنترل دقیق یک فرآیند یا گیاه را بدست آورد.
با این حال، ثبات سیستم میتواند یک مشکل اساسی بخصوص در سیستمهای حلقه بسته بد طراحی شده باشد زیرا ممکن است سعی در اصلاح بیش از حد خطاهایی داشته باشد که میتواند باعث از دست رفتن سیستم کنترل و نوسان شود.
در آموزش بعدی درباره سیستمهای الکترونیک، به روشهای مختلفی خواهیم پرداخت که از طریق آنها میتوانیم یک نقطه جمعبندی را وارد ورودی یک سیستم و روشهای مختلفی کنیم که بتوانیم سیگنالها را به آن برگردانیم.
