غالباً كلمات سروو موتور را در قسمت الكترونيك ميشنويد. همچنین ممکن است در پروژههای خود بارها از آن استفاده کرده باشید. اما درون آن چه چیزی وجود دارد و چگونه کار میکند؟ سروو موتور در واقع نوعی موتور است که به ما امکان کنترل سرعت سروو موتور و همچنین کنترل موقعیت و شتاب آن را در حین چرخش جسم میدهد. ما میتوانیم موتور را با استفاده از یک سیگنال PWM کنترل کنیم.
فهرست مطالب
سروو موتور چیست؟
سروو موتور(Servomotor)، یک الکتروموتور یا موتور فرمان یار است که بخشی از یک سیستم حلقه بسته است و از چندین بخش شامل مدار کنترل، موتور سروو، شافت، پتانسیومتر، چرخ دنده های محرک، تقویت کننده و یک انکودر یا رزولور تشکیل شده است.
سرووموتور یک دستگاه الکتریکی مستقل است که قسمتهای دستگاه را با راندمان بالا و با دقت بالا میچرخاند. اگر موتور به عنوان یک دستگاه کنترل شده مرتبط با سروومکانیسم، موتور DC باشد، معمولاً به عنوان سروو موتور DC شناخته می شود. اگر AC موتور کنترل شده را راه اندازی کند، به عنوان سروو موتور AC شناخته می شود.
داخل سروو موتور چیست؟
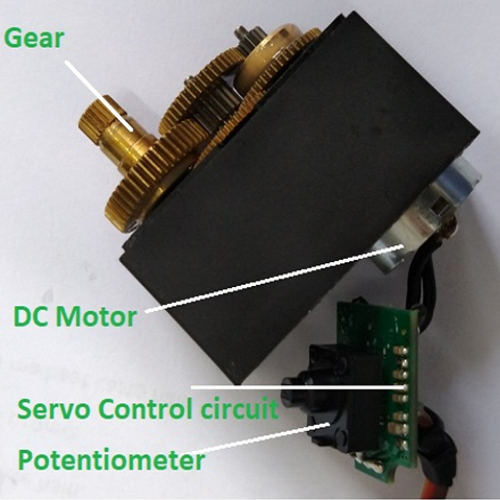
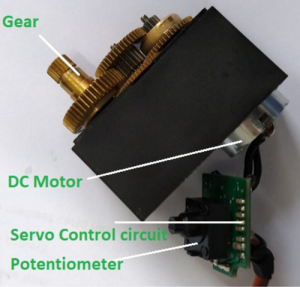
تمام سروو موتورها دارای این قطعات اساسی هستند:
- دنده
- موتور DC
- یک ماژول درایور
- یک گلدان کوچک (مخفف پتانسیومتر) که با یک شافت چرخان متصل شده است
- شافت
موتور DC
این یکی از مهمترین قسمتهای موتور است. هنگامی که ما میخواهیم موتور را کنترل کنیم، این موتور DC وظیفه راهاندازی و راهاندازی مکانیزم موتور را بر عهده دارد. مدار کنترل کننده از حسگر چرخشی / پتانسیومتر بازخورد میگیرد و جهت چرخش و سرعت موتور DC را کنترل میکند تا خروجی دلخواه در شافت موتور بدست آید.

دنده
وقتی ما یک موتور سروو میرانیم، پس از آن در چندین دور در دقیقه با سرعت بالا شروع به چرخش میکند (با توجه به نوع موتور DC که دارد). در موتورها به گشتاور بالا نیاز داریم. بنابراین، از چرخ دندهها (یا چرخ دندههای کاهنده) برای تبدیل سرعت بالا به گشتاور زیاد استفاده میشود. یعنی سرعت چرخش به گشتاور کاهش مییابد. چرخ دندههای موتور از فلز، پلاستیک یا مواد دیگر ساخته شدهاند.

درایور
یک درایور امکان کار آسان و کنترل موتورهای سروو را فراهم میکند. چهار حالت کنترل در راننده وجود دارد. این کنترل موقعیت، سرعت، گشتاور و کشش است. درایور تنظیم خودکار را فراهم میکند تا عملکرد بهینه و بدون تنظیمات دستی را فراهم کند.
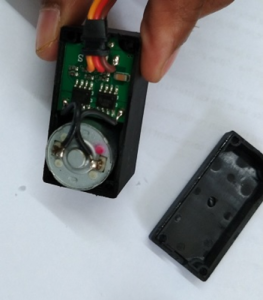
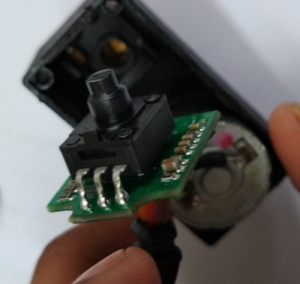
پتانسیومتر
این به عنوان یک سنسور بازخورد برای موتور عمل میکند. هنگامی که شافت میچرخد، پینهای پتانسیومتر متصل نیز میچرخند و به صورت تغییر مقاومت، خروجی میدهند. یک پتانسیومتر در مناطق مختلف مقاومت متفاوتی دارد که موقعیت موتور را به ماژول درایور اطلاع میدهد. بنابراین از این طریق پتانسیومتر به درایور بازخورد مداوم میدهد و به آن کمک میکند تا موقعیت دقیق شافت سروو را بدست آورد. اگر پتانسیومتر سرووموتور شما دچار مشکل شد می توانید برای خرید پتانسیومتر به فروشگاه اینترنتی دیجی قطعه سر بزنید و انواع پتانسیومتر را با قیمتی مناسب خریداری کنید.
هنگام دادن PWM به درایور چه اتفاقی داخل سروو میافتد؟
وقتی درایور سیگنال PWM میگیرد، با گرفتن بازخورد از پتانسیومتر، موقعیت سروو را بررسی میکند. اگر موقعیت آن زیر سطح مورد نظر باشد، موتور DC فعال شده و شروع به چرخش میکند. وقتی موقعیت به سطح دلخواه رسید، موتور خاموش میشود.
شافت
این احتمالاً تنها چیزی است که میتوانید در یک موتور محصور مشاهده کنید. شافت برای اتصال با هر پایه، چرخ دنده یا میله اتصال دیگر به منظور ایجاد مکانیزمی در سروو چرخش مداوم و در سروو چرخان 180 درجه استفاده میشود. اما در سروو خطی، شافت به مکانیزم پیچ و محوری متصل است.
انواع سروو موتور
سه نوع سروو DC وجود دارد که در بازار پیدا خواهید کرد. تعداد کمتری موتور وجود دارد که در دسترس هستند اما بیشتر اوقات این موتورهای پایه در رباتیک استفاده میشوند:
- زاویه دار
- با چرخش مداوم
- خطی
سروو موتور زاویه دار
سرو موتورهای زاویهدار از بازخورد مداوم پتانسیومتر استفاده میکنند و کنترل دقیق زاویهای شافت را میدهند. به طور کلی، تمام سرو موتورهای کنترل شده با زاویه، دامنه زاویهای بین 0 درجه تا 180 درجه دارند. اما برخی سرووها میتوانند تا 360 درجه کنترل زاویه را برای شما فراهم کنند.
سروو موتور با چرخش مداوم
سرو موتور با چرخش مداوم کنترل زاویهای شافت را فراهم نمیکند. با این حال، میتوانیم جهت چرخشی را با استفاده از یک سیگنال PWM کنترل کنیم.
در بیشتر سروو موتورهای چرخشی مداوم، پتانسیومتر در موقعیت خاصی ثابت میشود و وقتی میخواهیم موتور را به زاویه خاصی منتقل کنیم، راننده موتور DC را برای رسیدن به آن موقعیت حرکت میدهد. اما همانطور که پتانسیومتر در آن موقعیت خاص ثابت است، راننده هرگز آن بازخورد موضعی را دریافت نمیکند و موتور به حرکت خود ادامه میدهد. در یک موتور سروو با چرخش مداوم، ما نمیتوانیم زاویه دقیق سرو موتور را کنترل کنیم اما میتوانیم جهت چرخش و سرعت موتور را کنترل کنیم.
سروو موتور خطی
سرو موتورهای خطی مشابه سرووموتورهای کنترل شده زاویهای کار میکنند، اما در این حالت چرخش زاویهای برای بدست آوردن حرکت دقیق خطی در جهت جلو و عقب به یک حرکت خطی تبدیل میشود. اکثر سرو موتورهای خطی از مکانیزم رک و پینیون برای تبدیل موقعیت زاویهای به موقعیت خطی استفاده میکنند این موتورها همچنین به عنوان محرک های خطی عمل میکنند.
از بین همه این موتورها، سروو موتور زاویهای اصلیترین موتور است زیرا دو موتور دیگر با دستکاری موتور سروو زاویهای ساخته میشوند. اگر میخواهید یک سروو موتور خطی بسازید، کافی است یک مکانیزم دندانهدار و پینیون را به شافت موتور چرخشی زاویهدار وصل کنید تا حرکت خطی بدست آید.
تفاوت سروو موتور و استپ موتور
موتور استپر از یک روتور با آهنربا های دائمی و یک استاتور ثابت تشکیل شده است که سیمپیچها را حمل میکند. وقتی جریان از سیمپیچهای استاتور عبور میکند، توزیع شار مغناطیسی ایجاد میکند که با توزیع میدان مغناطیسی روتور تعامل میکند تا نیروی چرخشی ایجاد کند.
دارای تعداد کشش بالا، یعنی 50 یا بیشتر است. این هر قطب را در توالیای که روتور در یک سری مراحل افزایش میدهد، تأمین میکند، اما به دلیل تعداد زیاد کشش، حرکت مداوم است.
از موتور استپر معمولاً در مواردی استفاده میشود که دقت و کنترل در اولویت است، زیرا محدودیت سرعت وجود دارد. از موتورهای استپر در چاپگرهای رایانهای، اسکنرهای تصویر و درایو های کامپکت و غیره استفاده میشود. موتورهای استپری باید در حلقه بسته کار کنند. موتور پلهای نیز در مقایسه با موتور سروو ارزان نیست.
سرووموتورها به طور کلی برای استفاده در سرعت بالا طراحی شدهاند زیرا در مقایسه با موتورهای استپر سریعتر کار میکنند. از سرو موتورها در گیربکسها استفاده میشود تا گشتاور بسیار بیشتری را در سرعتهای مفید تحویل دهند.
برنامه های یک موتور سروو
برنامههای مختلفی وجود دارد که ما از موتور سروو استفاده میکنیم:
رباتیک: از آنها در لحظه قطعات مختلف رباتیک مانند پا، دست، صورت و … استفاده میشود.
کارخانهها: از آنها در واحدهای مختلف نساجی، صنایع برای واحدهای مونتاژ قطعات مختلف استفاده میشود.
خورشیدی: از آنها در لحظات صفحات خورشیدی برای گرفتن حداکثر نور خورشید، یعنی حرکت صفحات خورشیدی با توجه به لحظه خورشید استفاده میشود.
ابزارهای الکترونیکی: آنها در لحظه لنز دوربین برای دوربینهای DSLR، لحظه واحد دوربین در گوشیهای هوشمند (دوربین Popup) استفاده میشوند.
