
همانطور که میدانید امروزه کارهای زیادی مانند جوشکاری، رنگآمیزی و … توسط بازوی رباتیک در صنایع و کارخانهها انجام میشود. با این حال، برخی از مشاغل به دقت بالایی نیاز دارند که برای آن یک دست انسان همراه با ربات خودمختار لازم است. بنابراین ما یک نوع بازوی رباتیک HMI تولید کردهایم که با استفاده از آن رباتها میتوانند حرکات عملکرد انسان را دنبال کرده و کپی کنند. این امکان کنترل چندین بازوی رباتیک توسط یک انسان در مقیاس بزرگ را فراهم میکند.
فهرست مطالب
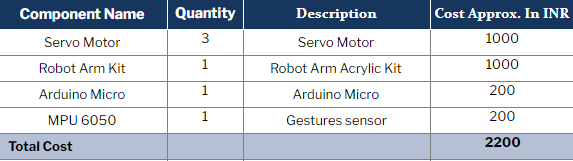
تجهیزات لازم برای ساخت بازوی رباتیک
برای شروع این پروژه، اجزای زیر را جمعآوری کنید
ساخت بازوی رباتیک مبتنی بر HMI
با قرار دادن سروو موتور به پایه، پیچ بازوی ربات را پیچ و مونتاژ کنید. سپس، سروو را با دو اتصال بازوی رباتیک برای حرکت بالا و پایین در جهت جلو وصل کنید.

برنامه نویسیبازوی رباتیک
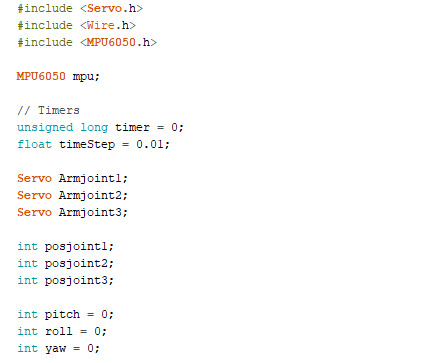
کتابخانههای زیر را نصب کنید و آنها را در کد وارد کنید:
- سروو
- آردوینو MPU6050
این موارد به ترتیب امکان کنترل موتورهای سروو را فراهم کرده و داده ها را از سنسور MPU6050 متصل به دست انسان برای به دست آوردن حرکت مطلوب میگیرند.
درحالیکه Arduino IDE از قبل با کتابخانه Servo نصب شده است، Arduino MPU6050 باید به صورت دستی نصب شود. برای انجام این کار، به Sketch → Library Manager → enter Arduino Mpu6050 in the search option → Install بروید.
پس از قرار دادن کتابخانهها در کد، چند متغیر برای ذخیره دادههای به دست آمده از سنسور MPU6050 و موتور سروو ایجاد کنید.
در مرحله بعد، یک تابع تنظیم برای شروع ارتباطات I2C با سنسور ایجاد کنید. پایههای موتورهای سرو را نیز تنظیم نمایید.
سپس یک تابع حلقه برای نقشهبرداری از مقادیر حرکت سنسور با دامنه حرکت زاویه سروو ایجاد کنید. پس از آن، هر مفصل سروو را دقیقاً به همان موقعیت مقدار نقشهبرداری شده برای زاویه سروو برسانید.
ارتباطات بازوی رباتیک
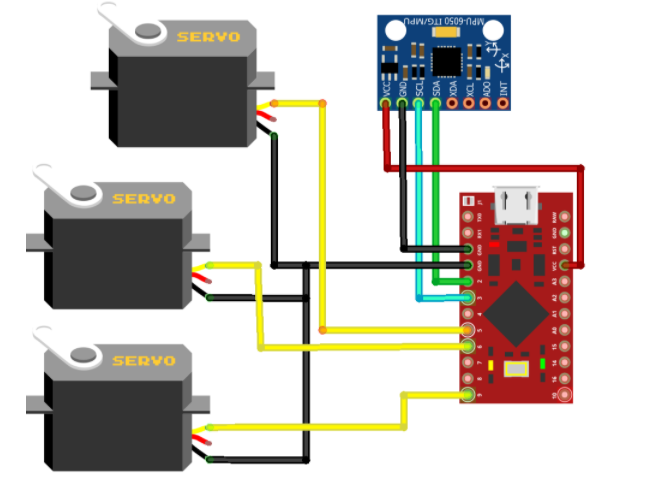
همانطور که در نمودار مدار زیر نشان داده شده است، قطعات را وصل کنید و سرووها را با یک باتری 5 ولت خارجی تأمین کنید. همچنین پین سیگنال سروو و سنسور MPU را به آردوینو وصل کنید.
آزمایش بازوی رباتیک
پس از اتصال و روشن کردن سرووها با باتری 5 ولت، سنسور MPU را در کف دست خود قرار داده و آن را حرکت دهید تا بازوی رباتیک به طور همزمان حرکت کند. برای اینکه بازوی رباتیک به سمت بالا حرکت کند، کف دست خود را به سمت بالا حرکت دهید. به همین ترتیب، روش حرکت به سمت پایین را تکرار نمایید.
با چنین رابط ماشین انسانی، رباتها میتوانند کارهای پیچیدهای انجام دهند.
