
همه ما شاهد پرواز هواپیمای بدون سرنشین و انجام کارهایی مانند تحویل بستهها و نظارت بر یک منطقه در میان دیگران بودهایم. به نظر میرسد که آنها بسیار گران هستند. اما آیا میتوانید از هواپیماهای بدون سرنشین با هزینه بسیار مقرونبهصرفه استفاده کنید؟
پاسخ این سوال مثبت است! امروز ما هواپیمای بدون سرنشین ارزان قیمت خود را با فریم F450 که از موتورهای 1000 کیلو ولت استفاده میکند، خواهیم ساخت.
فهرست مطالب
لوازم مورد نیاز برای ساخت هواپیمای بدون سرنشین
برای ساخت هواپیمای بدون سرنشین خود باید اجزای زیر را جمعآوری کنیم:
علاوه بر اینها، شما ممکن است به XT۶۰ یا هر اتصالدهنده دیگر همانند هر باتری نیاز داشته باشید.
ساخت و مونتاژ هواپیمای بدون سرنشین
موتور هواپیمای بدون سرنشین
پروانههایی که در بازار حضور دارند تعدادی عدد همراه با یک حرف (R یا L) یا بدون حرف روی خود دارند. بنابراین بیایید معنی این حروف و اعداد را درک کنیم.
حروف R یا L جهت چرخش پروانه را نشان میدهد.
R = جهت راست یا جهت عقربههای ساعت (CW)
L = جهت چپ و خلاف جهت عقربههای ساعت (CCW)
فرض کنید یک پروانه پیدا میکنید که شماره آن 1045 یا 1045R نوشته شده است.
در اینجا 2 رقم اول یعنی 10، طول پروانه را نشان میدهد. این به معنای طول پروانه 10 اینچ است. دو رقم بعدی یعنی 45، گام را نشان میدهد. این بدان معنی است که پروانه 4.5 اینچ هوا را قطع میکند.
با افزایش زمین، رانش ارائه شده به آن نیز افزایش مییابد. در همان زمان، یک گشتاور بالاتر از موتور مورد نیاز است. بنابراین، ما باید تعادل مناسب بین تنظیمات موتور و پروانه را حفظ کنیم.
درک چرخش و موتور هواپیمای بدون سرنشین
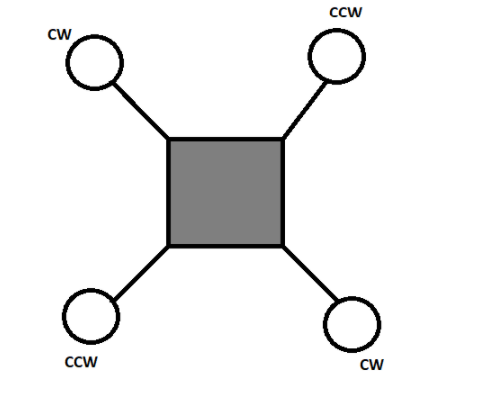
ما به ۲ سری از پروانهها که در جهت عقربههای ساعت و در جهت خلاف جهت عقربههای ساعت میچرخند، نیاز داریم. برای این کار، ما باید موتور را براساس آن تنظیم کنیم. راه آسان برای قرار دادن این پروانه و جهت موتور با به خاطر سپردن RRR به عنوان مثال “عقب سمت راست“ است. این به این معنی است که موتور در سمت راست باید چرخش ملخها را در جهت عقربههای ساعت بچرخانید. همچنین،
عقب چپ -> در خلاف جهت عقربههای ساعت
جلو چپ -> در جهت عقربههای ساعت
جلو راست -> در خلاف جهت عقربههای ساعت.
ارتباطات هواپیمای بدون سرنشین
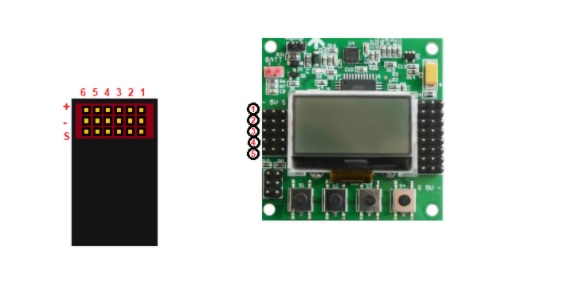
پین ESC موتور 1 با سیم زرد را به سیگنال پین کنترل کننده پرواز KK وصل کنید. همین کار را برای موتور 2 و غیره انجام دهید.
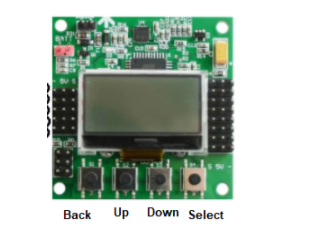
آماده سازی کنترل کننده پرواز
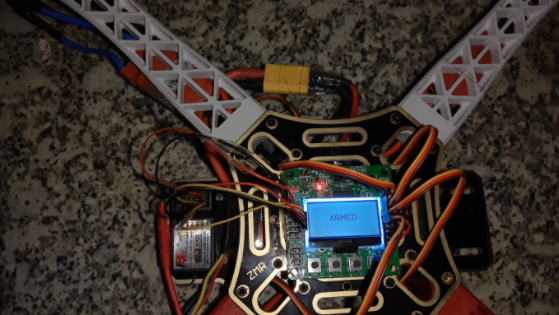
اکنون باید برخی تنظیمات را در کنترل کننده پرواز وارد کنیم. ابتدا میله گاز را به حالت حداقل تغییر دهید، فرستنده RC را روشن کرده و سپس اتصال باتری XT60 را به پهپاد وصل کنید. از آنجایی که پهپاد اکنون مجهز است، کنترلکننده پرواز صفحه نمایش را روشن میکند که پیام ایمنی یا خطا را نشان میدهد.
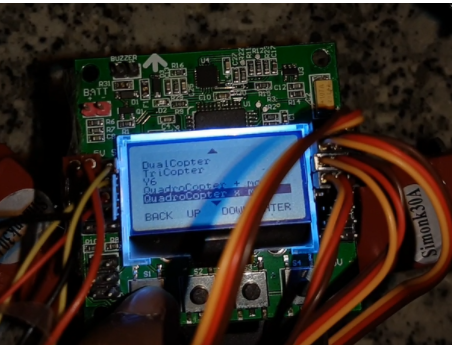
با استفاده از دکمههای موجود در کنترل کننده پرواز، به منو رفته و سپس با فشار دادن دکمه پایین، به Motor Layout بروید. نوع طرح موتور بار را انتخاب کنید.
از آنجا که ما از quad با پیکربندی x استفاده میکنیم، بنابراین طرح x quad motor را انتخاب کنید و سپس انتخاب را تأیید کنید. اکنون دکمه بازگشت را فشار دهید.

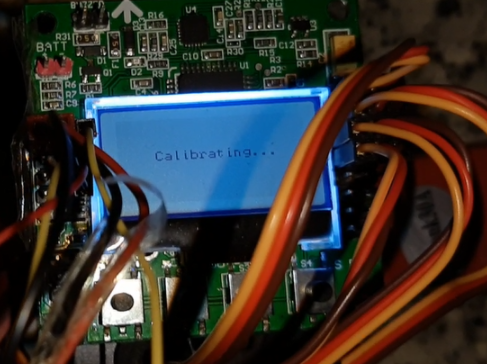
کالیبراسیون ACC
هواپیمای بدون سرنشین خود را روی یک سطح صاف قرار دهید و اطمینان حاصل کنید که کنترلکننده پرواز پایدار است و به سمت هیچ زاویهای کج نمیشود. حالا دکمه منو فشار داده و از دکمه بالا یا پایین برای رفتن به گزینه کالیبراسیون ACC استفاده کنید. با استفاده از دکمه انتخاب آن را انتخاب کنید. برای چند ثانیه صبر کنید تا کنترلکننده پرواز به طور اتوماتیک شتابسنج را تنظیم کند. هنگامی که تکمیل شد، یک پیغام تایید شده نمایش داده میشود.


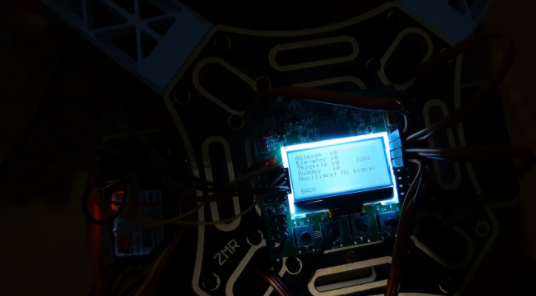


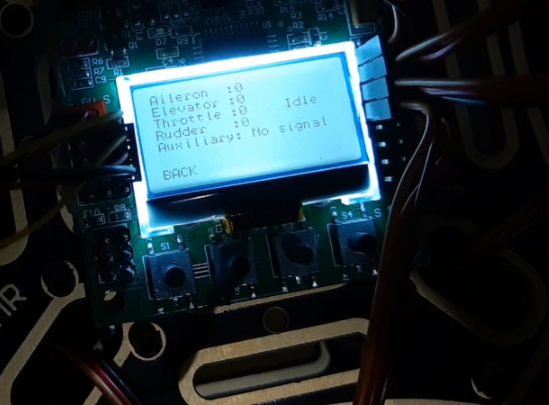
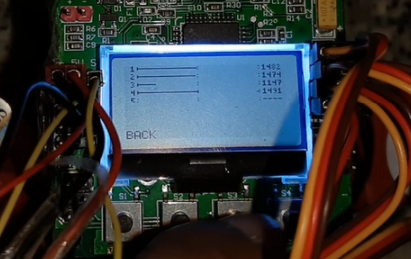
اکنون به تست گیرنده بروید و مقادیر Rudder ،Elevator ،Throttle را بررسی کنید. اگر مقدار آنها بیش از 1 است و بیش از 3 اختلاف دارد (با توجه به 0)، سپس با استفاده از گزینه trim در فرستنده از راه دور مقادیر آنها را به 0 کاهش دهید. هنگامی که مقادیر اصلاح شد، شما آماده پرواز هواپیمای بدون سرنشین هستید.
آزمایش کردن هواپیمای بدون سرنشین
برای رسیدن به پرواز، دریچه گاز را برای چند ثانیه به سمت چپ پایین نگه دارید و سپس به تدریج آن را به طور کامل افزایش دهید.

برای فرود آوردن بدون خلبان، گاز را با تغییر دادن دریچه گاز به سمت راست پایین کاهش دهید.
