تاریخچه موتورهای DC
در این مبحث قصد داریم تا شما عزیزان و علاقهمندان به الکترونیک را با مبانی موتور DC و ساز و کار آن آشنا سازیم. مردم یا دانشمندان در اوایل قرن نوزدهم تا زمان اختراع الکترومغناطیس، الکتریسیته و مغناطیس را به عنوان دو موضوع متفاوت تصور میکردند. در سال 1820، هانس کریستین اورستد متوجه شد که یک قطبنما (سوزن مغناطیسی) هنگام قرار دادن سیم در نزدیکی سیمی که جریان از آن عبور میکند، منحرف میشود.
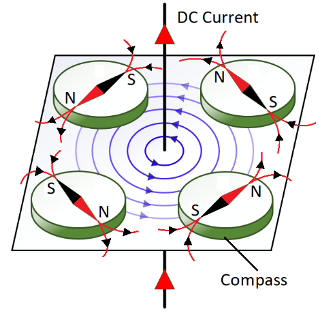
همانطور که در شکل 1 دیده میشود، جریان DC از سیم در جهت مشخص شده عبور میکند که یک میدان الکترومغناطیسی (خلاف جهت عقربههای ساعت) در اطراف سیم تولید میکند. این میدان الکترومغناطیسی با میدان مغناطیسی قطبنما اثر متقابل دارد و در نتیجه انحراف سوزنهای قطبنما را در چهار مکان مختلف قرار میدهد.
این اولین نمایش یک حرکت مکانیکی ناشی از جریان الکتریکی بود. مایکل فارادی، یک متفکر بزرگ علمی، با یک گام به جلو برداشتن این مفهوم، متوجه شد که چگونه میتوان آن را به حرکت درآورد و در نتیجه اولین موتور dc جهان را ایجاد کرد. اگرچه وسیلهای ابتدایی بود و هیچ هدف عملی نداشت، اما جهشی بزرگ برای بشر بود و منجر به پیشرفتهترین موتورهای امروزی شد.
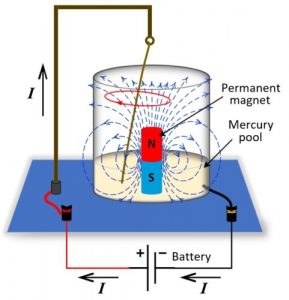
اولین آزمایش فارادی شامل یک سیم فلزی است که در یک فنجان جیوه به حالت تعلیق درآمده و رسانای خوبی برای برق است. سیم به گونهای تنظیم شده بود که یک سر آن در تماس با حمام جیوه آزاد باشد و بتواند آزادانه حرکت کند.
آهنربای دائمی در حمام جیوهای بیرون زده از مرکز پایین فنجان قرار داده شد. هنگامی که جریان از یک باتری الکتریکی از طریق سیم به حمام جیوه منتقل میشود (جهت جریان از مثبت به منفی با فلش در شکل 2 مشخص شده است)، یک میدان مغناطیسی دایرهای در اطراف سیم ایجاد میکند (پدیده کشف شده توسط Oersted).
میدان الکترومغناطیسی سیم با میدان مغناطیسی آهنربا دائمی تداخل میکند و باعث چرخش سیم در اطراف آهنربا در جهت عقربههای ساعت می شود.
ساز و کار ساخت موتور جریان مستقیم
اصل کار یک موتور DC بر این اساس استوار است که وقتی هادی حامل جریان در یک میدان مغناطیسی قرار میگیرد، هادی یک نیروی مکانیکی را تجربه میکند. جهت و مقدار این نیرو با قانون چپ Fleming ، F-> = B-> I-> L داده میشود.
در جایی که، F نیرو را نشان میدهد ، B چگالی شار مغناطیسی است، I جریان و L طول سیم است. جهت این نیرو عمود بر جهات جریان عبوری از سیم و میدان مغناطیسی خارجی است. این نیروی باتجربه گشتاوری تولید میکند که موتور DC را میچرخاند.
موتور DC به طور عمده از دو قسمت استاتور (قسمت استاتیک: آهنربای دائمی) و روتور (قسمت چرخان: سیمپیچ آرماتور) تشکیل شده است. آرماتور در میدان مغناطیسی تولید شده توسط قطب شمال و جنوب آهنربا دائمی قرار میگیرد همانطور که در شکل 3 (الف)، (ب) نشان داده شده است.
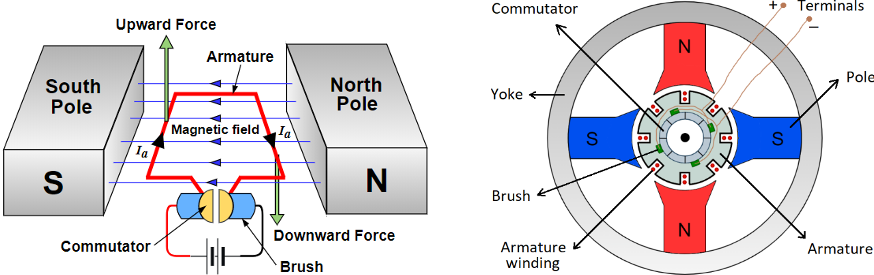
هنگامی که یک منبع تغذیه DC سیم پیچ آرماتور را متصل میکند، یک جریان الکتریکی در هادیهای آرماتور مستقر میشود که به دلیل میدان مغناطیسی نیرویی (در جهتی که با فلش مشخص شده است) را تجربه میکنند، مطابق اصولی که قبلاً گفته شد. یک طرف هادی آرماتور در زیر قطب شمال جریان را در یک جهت حمل میکند در حالی که طرف دیگر در زیر قطب جنوب جریان را در جهت مخالف حمل میکند و از این رو نیرو در هر طرف مخالف یکدیگر خواهد بود.
بنابراین، اگر یک طرف آرماتور در جهت بالا حرکت کند، طرف دیگر در جهت پایین حرکت میکند که منجر به چرخش آرماتور در جهت عقربههای ساعت میشود. وقتی هادی از یک طرف برس به طرف دیگر میرود، جریان موجود در آن هادی معکوس میشود. در عین حال، تحت تأثیر قطب بعدی قرار میگیرد که از قطب مخالف است.
در نتیجه، جهت نیرو بر هادی بدون تغییر باقی میماند. لازم به ذکر است که کموتاتور جریان هر هادی را هنگام عبور از یک قطب به قطب دیگر معکوس میکند که به ایجاد یک گشتاور مداوم و یک جهته برای ادامه چرخش روتور کمک میکند. در غیر این صورت، هر زمان که هادی تحت تأثیر قطب مغناطیسی مخالف قرار گرفت، جهت نیرو معکوس میشد.
هنگامی که آرماتور موتور dc میچرخد، هادیها نیز خطوط شار مغناطیسی را قطع میکنند و از این رو یک EMF در سیم پیچ آرماتور مطابق با قانون القای الکترومغناطیسی فارادی ایجاد میکند. جهت این EMF القا شده به گونهای است که با جریان آرماتور مخالف است و از این رو back-emf نامیده میشود.
مدل سازی دینامیکی موتور DC
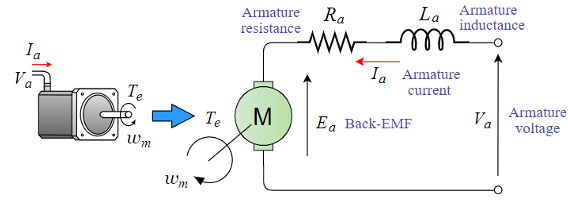
مدار آرماتور، نیروی الکتروموتور برگشتی (back-emf)، گشتاور و سیستم بار مکانیکی، مدل کامل دینامیکی سیستم محرک موتور DC را میتوان با چهار معادله زیر نشان داد. معادله ولتاژ برای سیمپیچ آرماتور یک موتور DC توسط:
در جایی که، Ia (t) نشان دهنده جریان آرماتور، القا سیمپیچ آرماتور Lais Ra مقاومت در برابر پیچ آرماتور است و Ea (t) برگشت EMF ناشی از چرخش سیمپیچ آرماتور در میدان مغناطیسی است. ولتاژ back-emf Ea (t) متناسب با سرعت زاویهای ωm (t) روتور است، میتواند به صورت زیر بیان شود:
![]()
که، kb ثابت برگشت EMF است. علاوه بر این، موتور متناسب با جریان آرماتور، یک گشتاور Te (t) تولید میکند.
![]()
که، kT ثابت گشتاور است. هنگامی که یک موتور DC با گشتاور خروجی برابر است. (3) در حال رانندگی یک سیستم بار مکانیکی است، سرعت روتور را میتوان از معادله حرکت تعیین کرد.
![]()
در جایی که TL (t) گشتاور بار است، Jm به ترتیب اینرسی لحظهای و Bm ضریب اصطکاک سیستم درایو موتور DC است.