اکنون در بسیاری از مناطق از فیلمبرداری استفاده میشود اما زمانی که در مورد فیلمبرداری صحبت میکنید، ثبت حرکت صورت یا شی در پاسخ به زمان واقعی برای فیلمبردار بسیار دشوار است. حرکت دوربین با همان سرعت حرکت صورت یا هدف بسیار دشوار است اگر این کار را به صورت دستی انجام دهید. بنابراین ما تصمیم گرفتهایم که چرا سعی نکنیم یک دوربین هوشمند بسازیم که به ما امکان میدهد در زمان واقعی فیلم از سرهای متحرک فیلمبرداری کنیم. بنابراین امروز ما یک سیستم هوشمند با برخی موتورها خواهیم ساخت که فیلم را در زمان واقعی ضبط میکند، چهره را شناسایی میکند و دوربین را همراه با حرکت چهره حرکت میدهد.
 وسایل مورد نیاز برای دوربین هوشمند
وسایل مورد نیاز برای دوربین هوشمند
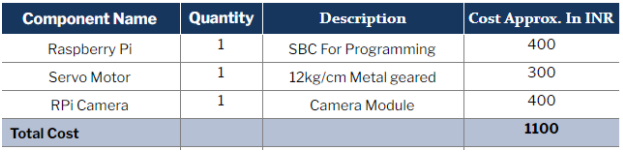 وسایل مورد نیاز برای دوربین هوشمند
وسایل مورد نیاز برای دوربین هوشمندبرای راهاندازی ماژولهای پایتون در صفحه Raspberry Pi از دستورات زیر استفاده کنید:
sudo pip3 install gpiozero sudo pip3 install opencv-python sudo pip3 install nmap sudo pip3 install dlib sudo pip3 install face_recoginition
برای فعال کردن دوربین RPi، از sudo raspi-config استفاده کنید و سپس به رابطها بروید.
برنامه نویسی دوربین هوشمند
دو کد مختلف بنویسید: یکی برای ردیابی اشیا target هدف و دیگری برای ردیابی چهره و دوربین. در اینجا دوربین مختصات x و y صورت را به دست میآورد و سپس آنها را به زاویه حرکت موتور سروو ترجمه میکند.
در کد، فقط مختصات x موتور سروو و نه حرکت مختصات y صورت ردیابی میشود. اما میتوانید یک سروو موتور دیگر اضافه کنید تا حرکت صورت مختص y را ردیابی کند.
کد تشخیص چهره را که قبلاً برای پروژه ربات تشخیص چهره نوشته شده بود، پیادهسازی کنید و سپس چند کتابخانه جدید به کد وارد کنید.
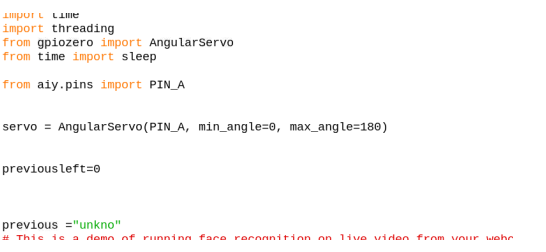
برای کنترل سروو حتماً کتابخانه gpiozero را در کد وارد کنید. سپس شماره پین Raspberry Pi را تنظیم کنید تا موتور سروو کنترل شود.
در اینجا میتوانید از هر پایه PWM رزبری پای استفاده کنید. یک کاپوت به Raspberry Pi متصل شده است که پایه A آن (و نه Raspberry Pi) امکان کنترل مستقیم سروو را فراهم میکند.
پس از بدست آوردن مختصات x از صورت، از آن برای نوشتن مقادیر موقعیتی برای موتور سروو استفاده کنید تا شافت همزمان با حرکت صورت حرکت کند. با این کار دوربین متصل شده نیز قادر به حرکت است.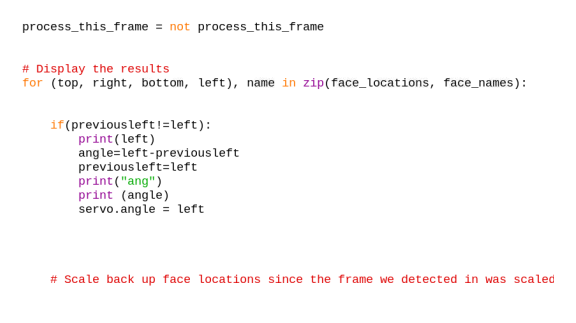 تست فیلمبرداری با حرکت چهره
تست فیلمبرداری با حرکت چهره
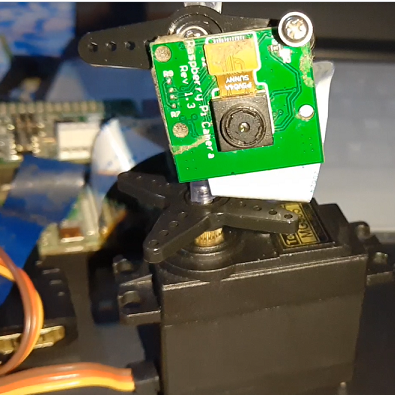
سیم سروو مثبت (قرمز) را به منبع تغذیه 5 ولت و منبع منفی منبع برق (سیم سیاه) را به پایه GND Raspberry Pi وصل کنید. سپس، سیم زرد موتور سروو را به پایه GPIO Raspberry Pi وصل کنید. حالا دوربین Raspberry Pi را روی سروو نصب کنید (همانطور که در زیر نشان داده شده است).

کد را اجرا کرده و صورت خود را مقابل دوربین حرکت دهید. دوربین با همان سرعت حرکات صورت شما را دنبال می کند و باعث میشود فیلمبرداری از هر زاویه مشخص صاف باشد.
این پروژه میتواند بیشتر شود تا دوربین بتواند حرکات صورت خطی/عمودی را دنبال کند.
کد منبع را بارگیری کنید
