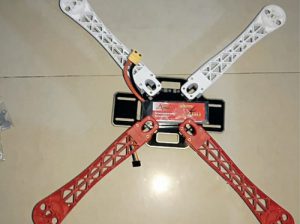
هواپیماهای بدون سرنشین کوچک یا پهپاد برای تحویل بستهها، برای فیلمبرداری از وقایع مانند ازدواج و نظارت بر قلمرو دشمن استفاده میشود. میتوانید بدون صرف هزینه زیاد در خانه هواپیمای بدون سرنشین بسازید. در اینجا یک هواپیمای بدون سرنشین کوادکوپتر ارزان قیمت با استفاده از قاب F450 و موتورهای DC ارائه شده است. نمونه اولیه در شکل 1 نشان داده شده است.

فهرست مطالب
تجهیزات موردنیاز ساخت پهپاد یا کوادکوپتر
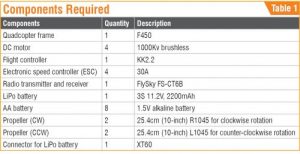
برای ساخت هواپیمای بدون سرنشین یا پهپاد، باید اجزای ذکر شده در جدول 1 را جمعآوری کنید. همچنین ممکن است به سیمهای اتصال دهنده و اتصالات مدار و باتری نیاز داشته باشید.
قبل از شروع کار به ساخت و مونتاژ پروژه پهپاد ، باید با نکات اساسی در مورد هواپیمای بدون سرنشین از جمله ملخ، چرخش موتور، فرستنده و گیرنده آن آشنا شوید.
پروانه ها
ملخها با اعدادی که روی آنها مشخص شده است، همراه با حرف R یا L و گاهی اوقات بدون هیچ حرفی میآیند. اگر عدد با R شروع شود، به معنای چرخش راست یا عقربه ساعت است. اگر عدد زیر R 1045 باشد (مانند R1045)، دو رقم اول (10) طول پروانه را به اینچ نشان میدهد (در این حالت 10 اینچ یا 25.4 سانتیمتر). دو رقم بعدی (45) گام (4.5 اینچ یا 11.43 سانتیمتر) را نشان میدهد که ملخ در هر دور هوا را قطع میکند.
اگر عدد روی ملخ با L شروع شود، البته این بدان معنی است که پروانه برای چرخش ضد جهت عقربه ساعت در نظر گرفته شده است. در این پروژه دو پروانه مخصوص چرخش عقربههای ساعت و دو پروانه نیز جهت عقربههای ساعت هستند.
با افزایش گام، رانش ارائه شده توسط پروانه نیز افزایش مییابد. اما این نیاز به گشتاور بالاتر از موتور دارد. بنابراین، شما باید تعادل مناسب بین تنظیمات موتور و پروانه را حفظ کنید.
موتورها
در یک هواپیمای بدون سرنشین، پهپاد یا کوادکوپتر، دو موتور DC برای چرخش در جهت عقربههای ساعت و دو موتور دیگر برای چرخش در جهت خلاف جهت عقربههای ساعت مورد نیاز است. یک پروانه مناسب به هر یک از موتورها متصل است.
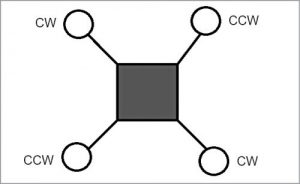
برای پرواز کوادکوپتر، چرخش هر پروانه باید رانش کافی برای بلند کردن هواپیمای بدون سرنشین را فراهم کند. برای رسیدن به این هدف، موتورها باید به روش زیر تنظیم شوند:
موتور جلو سمت چپ باید در جهت عقربههای ساعت (CW) بچرخد
موتور جلو و راست باید خلاف جهت عقربههای ساعت بچرخد (CCW)
موتور عقب سمت چپ باید خلاف جهت عقربههای ساعت بچرخد (CCW)
موتور عقب راست باید در جهت عقربههای ساعت بچرخد (CW)
بنابراین، ما باید موتورها و پروانهها را مطابق شکل 2 نشان دهیم.
کنترل کننده سرعت الکترونیکی
هر موتور در کوادکوپتر یا پهپاد به مداری به نام کنترل کننده سرعت الکترونیکی (ESC) متصل است. کنترل کننده پرواز کوادکوپتر از طریق ESC اطلاعات را به موتورها میفرستد. هر ماژول ESC باید حداقل 10A بیشتر از موتور باشد. فرض کنید موتور شما در جریان گاز کامل 20 آمپر مصرف خواهد کرد، پس ESC باید 30A یا بیشتر باشد.
درجهبندی Kv موتورها به سرعت ثابت یک موتور اشاره دارد (برای کیلو ولت کیلو ولت نیست). پایین بودن درجه Kv به معنای دور در دقیقه موتور است. این بدان معنی است که برای رانش کافی برای بلند کردن هواپیمای بدون سرنشین به یک پروانه طولانیتر نیاز است. با درجهبندی بالاتر Kv در موتورها، میتوان از ملخهای کوچکتر استفاده کرد.
در این پروژه از موتورهای بدون برس 1000Kv به همراه کنترل کنندههای الکترونیکی سرعت 30A استفاده میشود. از آنجایی که درجهبندی Kv پایین است، برای بلند کردن بدنه هواپیمای بدون سرنشین F450 به حداقل پروانه 25.4 سانتیمتری نیاز داریم.
در صورت استفاده از قاب کوچک هواپیمای بدون سرنشین مانند QAV250 با پروانههای 12.7 سانتیمتری کوچکتر، موتورهای مشابه قادر به بلند کردن هواپیمای بدون سرنشین نخواهند بود. برای دریافت نیروی رانش کافی از این ملخها، به موتور Kv بالاتر مانند موتورهای 2000Kv نیاز خواهیم داشت.
فرستنده و گیرنده رادیویی پهپاد
مجموعه فرستنده و گیرنده FlySky FS-CT6B در این پروژه استفاده شده است. اینها از قبل برنامهریزی شده و از قبل مقید شدهاند. اگر میخواهید فرستنده یا گیرنده رادیویی را تغییر دهید، ابتدا باید آنها را متصل کنید.
فرستنده رادیویی برای کنترل هواپیمای بدون سرنشین به تنظیمات نیاز دارد. ابتدا باید فرستنده خود را به گیرنده متصل کنید، که فرستنده شما را قادر میسازد گیرنده و از این رو هواپیمای بدون سرنشین را کنترل کند. مراحل و پیکربندیهای اتصال به طور معمول در کتابچه راهنمای کاربر توضیح داده شده است.
ساخت و مونتاژ پهپاد
همانطور که در شکل نشان داده شده است ابتدا چهار بازوی کوادکوپتر را به قاب مرکزی پیچ کنید. ESC را به صفحه مدار توزیع برق قاب بچسبانید. باتری LiPo را در وسط قاب هواپیمای بدون سرنشین نصب کنید. برای این کار ممکن است از نوار عایق استفاده کنید.
اکنون کنترل کننده پرواز KK 2.2 را در وسط قاب نصب کرده و آن را با چسب ثابت کنید همانطور که در شکل 4 نشان داده شده است. بعد موتورهای بازوها را با پیچ ثابت کرده و هر چهار ESC را به بازوها وصل کنید. پروانههای صحیح را به موتورها وصل کنید.

کالیبراسیون ESC
ما باید تمام ESC ها را کالیبره کنیم تا همه موتورها همزمان شروع شوند و حداکثر سرعت را در گاز کامل بدست آورند. اکثر کنترل کنندههای پرواز تنظیمات خود را برای کالیبراسیون ESC دارند. کالیبراسیون دستی برای هر ESC را میتوان با استفاده از گیرنده و فرستنده رادیویی انجام داد.
برای کالیبراسیون پهپاد خود، یک موتور را به ESC و سپس به کانال 3 (گاز گیرنده RC) متصل کنید. دکمه گاز را در حداکثر موقعیت در فرستنده رادیویی نگه دارید و فرستنده را روشن کنید. پس از آن باتری LiPo و برق را بر روی ESC متصل کنید. دو بوق منتظر بمانید و سپس چوب / دکمه گاز را به حداقل موقعیت برسانید و چند ثانیه صبر کنید تا سه بوق بشنوید. سپس باتری LiPo را از برق جدا کرده و به برق وصل کنید. به آرامی چوب گاز را حرکت دهید و موتورها شروع به چرخش میکنند. با استفاده از این، یکی از ESC های شما کالیبره میشود.
برای کالیبره کردن مراحل مشابه را با سایر ESC ها یکی یکی تکرار کنید. هواپیمای بدون سرنشین کوادکوپتر مونتاژ شده با ماژول ESC که روی هر بازو نصب شده است در شکل 5 نشان داده شده است.

یک سر هر ESC دارای سه سیم برای اتصالات موتور است. انتهای دیگر ESC دارای پنج کابل است: به ترتیب دو کابل ضخیم برای منبع تغذیه (پین سیاه برای GND و پین قرمز برای مثبت) و سه کابل نازک برای تامین مثبت 5 ولت، سیگنال و پایههای زمین. کابل زرد پین سیگنال برای کانال 3 گیرنده رادیویی است.
در سمت فرستنده، گاز را در موقعیت کم نگه دارید و با اتصال به باتری LiPo آن را روشن کنید. (این مراحل مستلزم برداشتن تمام پروانه های متصل به موتورها هستند) سپس چوب دریچه گاز را به آرامی فشار دهید تا جایی كه ببینید موتور در جهت عقربههای ساعت یا خلاف عقربههای ساعت در حال حركت است. اگر در جهت عقربههای ساعت باشد، موتور باید در قسمت چپ جلو باشد. سپس دو سیم ESC را بکشید / عوض کنید و جهت معکوس موتور را بررسی کنید. همین روند را با تمام موتورها تکرار کنید و مطمئن شوید که چرخش موتورها مطابق جهت نشان داده شده در شکل 2 است.
اکنون میتوانید پروانهها را به موتورها متصل کنید.
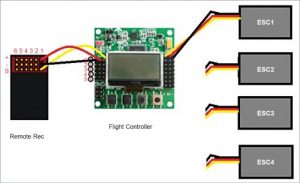
سیم زرد هر ESC را به سیگنال پین کنترل کننده پرواز وصل کنید. اتصالات بین ESC، کنترل پرواز و گیرنده از راه دور در شکل 6 نشان داده شده است. ESC1 را از طریق ESC4 به ترتیب به پایههای ردیف چهارم کنترل کننده پرواز متصل کنید. مجدداً، به ترتیب پایههای ردیف چهارم را به ترتیب از پایههای کنترل کننده پرواز به ستون اول از طریق پایههای ستون چهارم گیرنده از راه دور وصل کنید.
تنظیمات کنترل پرواز
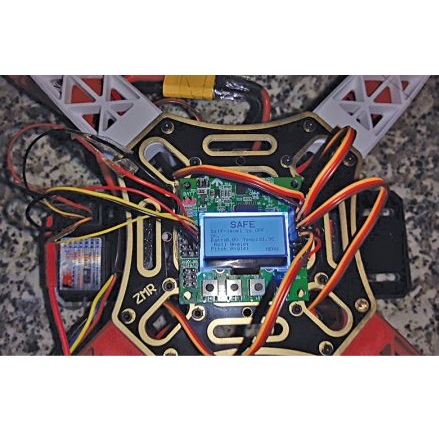
سپس، باید تنظیماتی را در کنترل کننده پرواز انجام دهیم. ابتدا میله گاز را در حداقل موقعیت قرار داده و فرستنده RC را روشن کنید. باتری را به پهپاد وصل کنید و پهپاد را روشن کنید. اکنون کنترل کننده پرواز روشن میشود و ما میتوانیم نمایشگر یا ایمنی یا خطا را در LCD کنترل کننده نشان دهیم.
همانطور که در شکل 7 نشان داده شده است، با استفاده از دکمههای کنترل کننده پرواز، به منو رفته و نوع Motor Layout را با استفاده از دکمه پایین انتخاب کنید. طرح موتور quad x را انتخاب کنید، انتخاب را تأیید کنید و دکمه برگشت را فشار دهید. توجه داشته باشید که واحد کنترل کننده پرواز باید به درستی به قاب F450 متصل شود.

کالیبراسیون شتاب سنج
پهپاد یا هواپیمای بدون سرنشین خود را روی یک سطح صاف قرار دهید، اطمینان حاصل کنید که کنترل کننده پرواز پایدار است و به طرف دیگر متمایل نیست.
دکمه منو را فشار داده و با استفاده از دکمه بالا / پایین به گزینه “Acc calibration” بروید همانطور که در شکل 8 نشان داده شده است.
گزینه را انتخاب کنید و سپس دوباره دکمه انتخاب را فشار دهید تا ادامه دهید. چند ثانیه منتظر بمانید تا کنترل کننده پرواز به طور خودکار شتاب سنج را کالیبره کند و سپس روی صفحه نمایش “OK to go” را نشان دهد.

کنترل کننده پرواز از سیگنالهای گیرنده رادیویی استفاده میکند و این سیگنالها را به همراه سیگنالهای تثبیت کننده برای کنترل هواپیمای بدون سرنشین از طریق ورودیهای کاربر Aileron، آسانسور، دریچه گاز و سکان هدایت میکند.
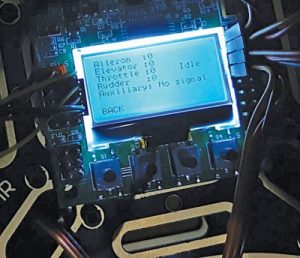
در سمت گیرنده، سکان، آسانسور، گاز و سایر مقادیر را بررسی کنید. اگر هر مقداری بیش از صفر است، از گزینه اصلاح در فرستنده از راه دور استفاده کنید.
همانطور که در شکل 9 نشان داده شده است، مقدار را صفر کنید، هنگامی که مقدار آن اصلاح شد، هواپیمای بدون سرنشین آماده پرواز است.
آزمایش کردن پهپاد
برای شروع پرواز، به نام مسلح کردن، چوب دریچه گاز را برای چند ثانیه در فرستنده نگه دارید تا به سمت چپ پایین برود و سپس گاز را به آرامی افزایش دهید تا کامل شود. صفحه نمایش Armed را نشان میدهد همانطور که در شکل 10 نشان داده شده است. هواپیمای بدون سرنشین اکنون آماده پرواز است.

برای نشستن هواپیمای بدون سرنشین، گاز را کم کرده و آن را خلع سلاح کنید و چوب گاز را به سمت پایین راست ببرید.
