
فهرست مطالب
ماژول بازر اکتیو KY-012 چیست ؟

ماژول بازر پیزو اکتیو KY-012 یک ماژول 3 پین است که بدون نیاز به مدولاسیون عرض پالس (PWM) یا کد پیچیده اضافی، صدایی قابل شنیدن در فرکانس 2.5 کیلوهرتز ایجاد می کند. تنها شرط این است که پین سیگنال را روی HIGH تنظیم کنید. از جمله مزایای خرید ماژول بازر اکتیو KY-012 این است که برخلاف ماژول Buzzer پسیو (ky-006) برای ایجاد یک صدا، نیازی به موج مربعی ندارد و با حداقل ولتاژ 3.3 ولت در پایه سیگنال موج مربع را ایجاد می کند. ممکن است این ماژول را با نام ماژول بیزر اکتیو شنیده باشید؛ اما این نام غلطی است که در بازار رایج شده است. چراکه ماژول بازر (buzzer) از buzz به معنای صدای ریز/ ویز ویز می آید که تلفظ آن بازر است؛ نه بیزر!
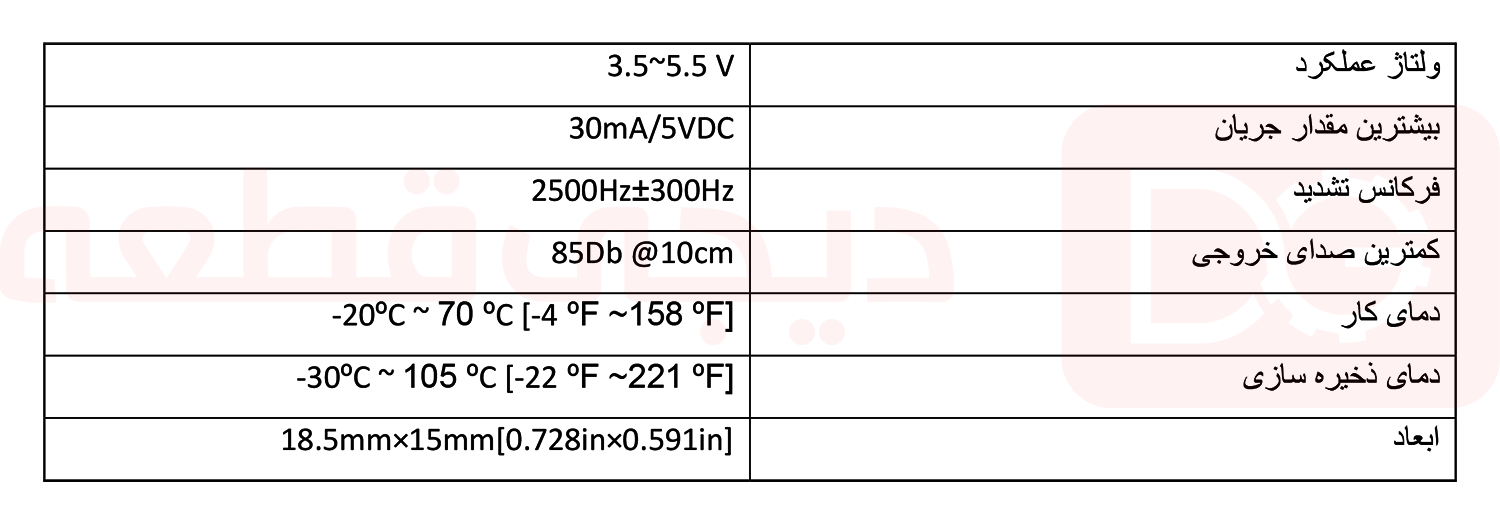
مشخصات فنی بازر ky012
ماژول KY-012 از یک بازر یا زنگ اکتیو پیزوالکتریک تشکیل شده است و هنگامی که سیگنال زیاد است، صدایی تقریباً با فرکانس 2.5 کیلوهرتز تولید می کند. از این ماژول برای پخش صدای آلارم نیز استفاده می شود. همچنین شما می توانید ماژول KY-012 را به راحتی با آردوینو و رزبری پای راه اندازی کنید. مشخصات این ماژول در جدول زیر آمده است:
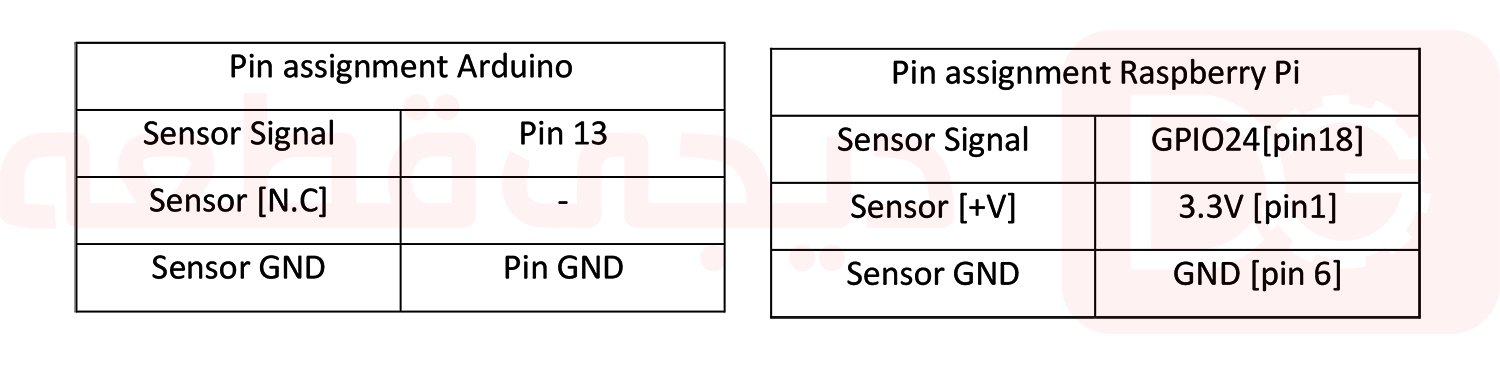
پایه های ماژول KY-012 Buzzer

اتصال پایه های ماژول در برد Arduino و Raspberry Pi در جدول های زیر آورده شده است:
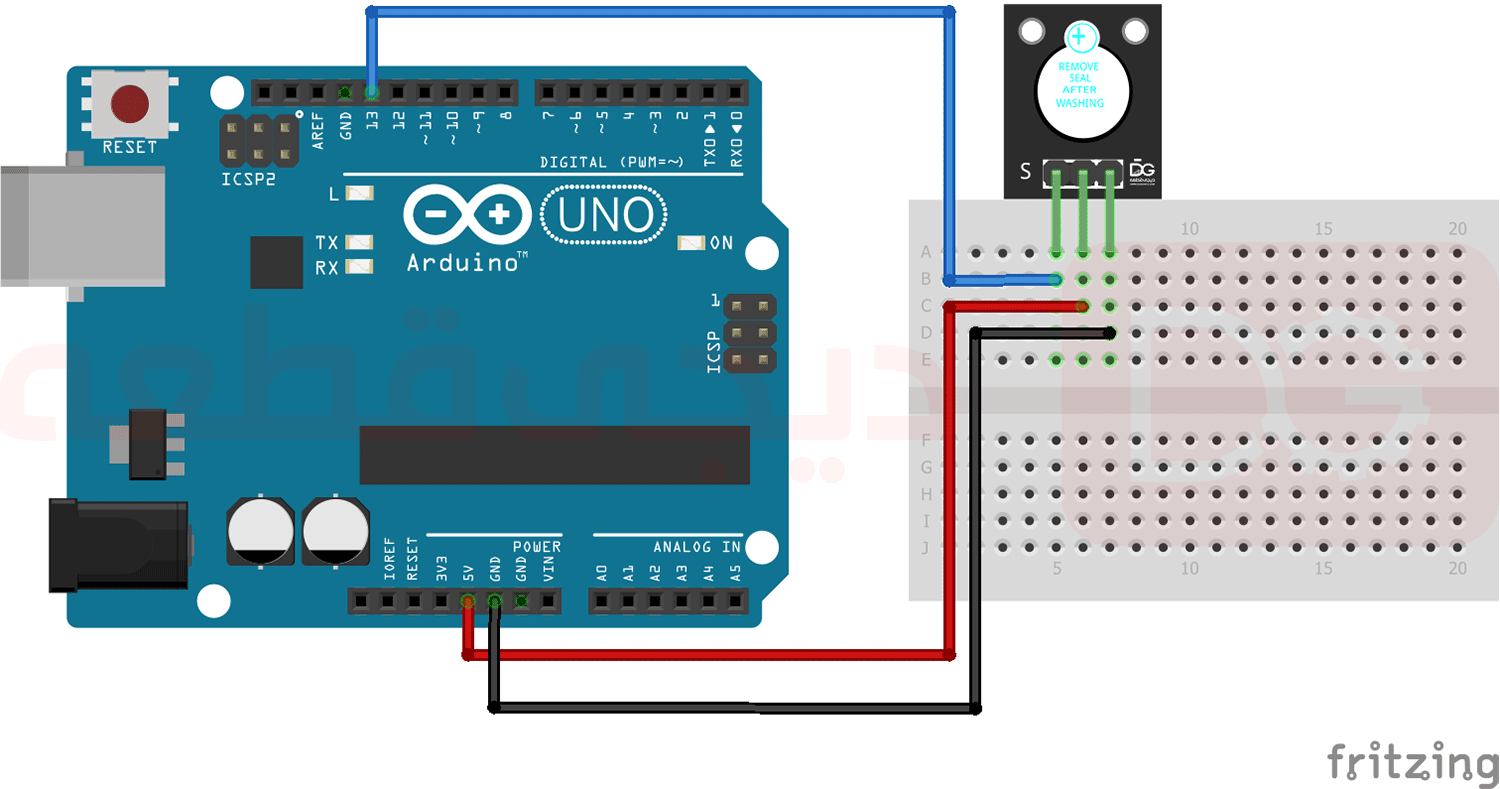
دیاگرام اتصالات ماژول بازر اکتیو
پایه های مختلف ماژول را مطابق جدول بالا و به صورت آنچه در تصویر زیر مشاهده میشود به برد آردوینو متصل کنید.
کدهای آردوینو مربوط به ماژول بازر اکتیو KY012

در ادامه نحوه راه اندازی بازر ky012 با آردوینو را می بینیم. در کد ارایه شده زیر خواهید دید که چگونه صدا به مدت 4 ثانیه روشن می شود و به مدت 2 ثانیه خاموش می شود.
int Buzzer = 13;
void setup ()
{
pinMode (Buzzer, OUTPUT); // Output pin initialization for the buzzer
}
void loop () //Main program loop
{
digitalWrite (Buzzer, HIGH); // Buzzer will be on
delay (4000); // Waitmode for 4 seconds
digitalWrite (Buzzer, LOW); // Buzzer will be off
delay (2000); // Waitmode for another 2 seconds in which the buzzer will be off
}
کدهای Raspberry Pi مربوط به ماژول بازر KY-012

import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
# Output pin declaration for the Buzzer.
Buzzer_PIN = 24
GPIO.setup(Buzzer_PIN, GPIO.OUT, initial= GPIO.LOW)
print ("Buzzer-test [press ctrl+c to end the test]")
# Main program loop
try:
while True:
print("Buzzer will be on for 4 seconds")
GPIO.output(Buzzer_PIN,GPIO.HIGH) #Buzzer will be switched on
time.sleep(4) #Waitmode for 4 seconds
print("Buzzer wil be off for 4 seconds")
GPIO.output(Buzzer_PIN,GPIO.LOW) #Buzzer will be switched off
time.sleep(2) #Waitmode for another 2 seconds in which the buzzer will be off
# Scavenging work after the end of the program
except KeyboardInterrupt:
GPIO.cleanup()
