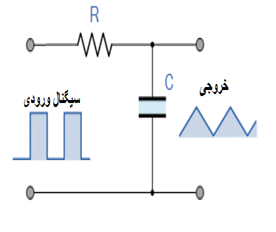
در شکل موج های RC و مدارهای RC هنگامی که یک شکل موج متناوب به ورودی آن اعمال شود میتواند شکل موج های خروجی کاربردی مانند مربعی، مثلثی و ارهای را تولید کند.
فهرست مطالب
سیگنال موج مربعی
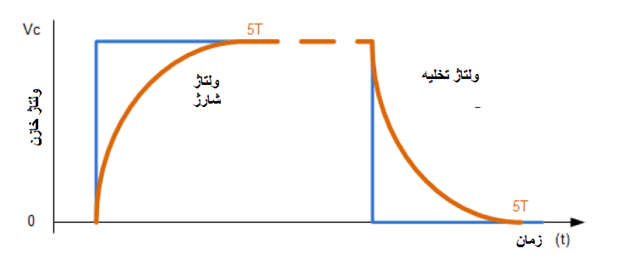
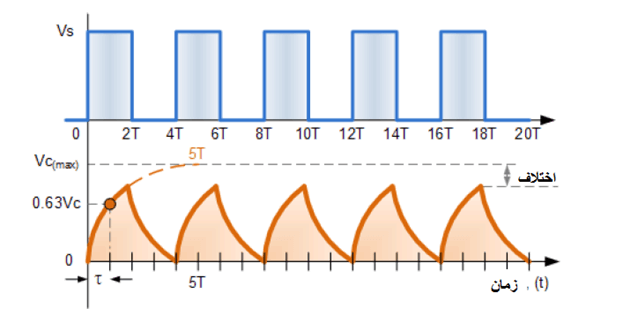
در آموزشهای قبلی درباره مدارهای شارژ و تخلیه RC دیدیم که چگونه یک خازن دارای توانایی برای شارژ و تخلیه خود از طریق یک مقاومت متصل سری است. زمان صرف شده برای شارژ و تخلیه کامل خازن زمانی که یک ولتاژ DC ثابت به آن اعمال شده و یا حذف شده است معادل با 5 ثابت زمانی RC یا 5T است.
اما اگر این تغذیه DC ثابت را به شکل موج مربعی یا پالس که به صورت ثابت از یک مقدار بیشینه به یک مقدار مینیمم در یک نرخ تعیین شده توسط پریود زمانی یا فرکانس تغییر دهیم چه اتفاقی خواهد افتاد. این شکل موج های RC خروجی را برای یک مقدار ثابت زمانی RC چگونه تحت تاثیر قرار خواهد داد؟
قبلا دیدیم که خازن زمانی که یک ولتاژ به آن اعمال میشود تا 5T شارژ میشود و تا 5T زمانی که ولتاژ حذف شد، تخلیه میشود. در مدارهای شارژی و تخلیه این مقدار ثابت زمانی 5T همیشه صحیح میماند زیرا که آن توسط ترکیب مقاومت –خازن (RC) ثابت شده است. سپس زمان مورد نیاز واقعی برای شارژ یا تخلیه کامل خازن تنها میتواند توسط تغییر مقدار خود خازن یا مقاومت در مدار تغییر یابد و این در زیر نشان داده شده است.
شکل موج های RC نوعی
تبدیل موج مربعی به سینوسی
شکلهای موج کاربردی میتواند توسط استفاده از مدارهای RC با ثابت زمانی مورد نیاز به دست آید. اگر ما یک شکل موج ولتاژ موج مربعی پیوسته به مدار RC که پهنای پالس آن دقیقا با ثابت زمانی 5RC (5T) مدار منطبق است، اعمال کنیم سپس شکل موج ولتاژ دو سر خازن چیزی شبیه به این خواهد بود:
شکل موج ورودی 5RC
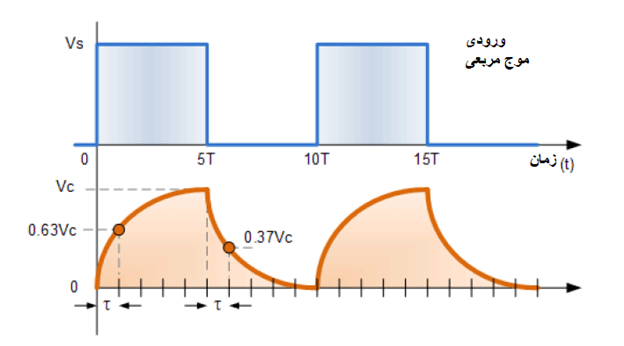
افت ولتاژ دو سر خازن بین شارژ شدن تا VC و تخلیه به پایین تا صفر طبق ولتاژ ورودی تناوب میکند. اینجا در این مثال، فرکانس شکل موج ولتاژ موج مربعی ورودی (و درنتیجه پریود زمان حاصل f=1/T) دقیقا با دو برابر ثابت زمانی 5RC مطابقت میکند.
این ثابت زمانی (10RC) شارژ کامل خازن در طول پریود “روشن” بودن شکل موج ورودی (0 تا 5RC) و سپس تخلیه کامل در طول پریود “خاموش” بودن (5 تا 10RC) حاصل در شکل موج های RC تطبیقی کامل را ممکن میسازد.
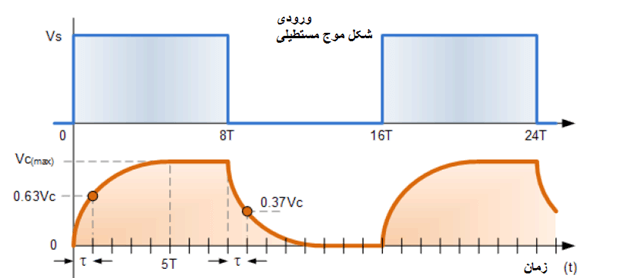
اگر پریود زمانی شکل موج ورودی طولانیتر ساخته شود(فرکانس پایینتر f<1/10RC) برای مثال یک پهنای پالس نصف پریود : روشن” معادل با “8RC ” است، سپس خازن به مدت طولانی کاملا شارژ شده و همچنین کاملا تخلیه شده خواهد ماند و شکل موج های RC همانطور که نشان داده شده تولید می کند.
شکل موج ورودی 8RC طولانی تر
اگرچه اگر اکنون پریود زمانی کلی شکل موج ورودی (فرکانس بالا f>1/10RC ) را کاهش دهیم یا “4RC “، خازن زمان کافی برای شارژ کامل در طول پریود “روشن” یا تخلیه کامل درون پریود “خاموش” شدن نخواهد داشت. درنتیجه، افت ولتاژ حاصل دو سر خازن VC کمتر از ولتاژ ورودی بیشینه خود خواهد بود و شکل موج های RC همانطور که در زیر نشان داده شده تولید میکند.
شکل موج ورودی 4RC کوتاه تر
سپس با تغییر ثابت زمانی RC یا فرکانس شکل موج ورودی، میتوان ولتاژ دو سر خازن را تغییر داد که یک رابطه بین VC و زمان t ایجاد میکند. این رابطه میتواند برای تغییر شکل موجهای گوناگون به کار برده شود بنابراین شکل موج خروجی دو سر خازن به ندرت همان را در ورودی تشبیه میکند.
پاسخ فرکانسی شکل موج های RC
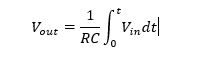
انتگرالگیر RC
انتگرالگیر یک نوعی از مدار فیلتر پایین گذر است که یک سیگنال ورودی موج مربعی را به یک خروجی شکل موج مثلثی تبدیل میکند. همانطور که در بالا دیده شد، اگر ثابت زمانی 5RC با پریود زمانی شکل موج RC ورودی به صورت طولانی مقایسه شود خروجی حاصل در شکل مثلثی خواهد بود و هرچه فرکانس ورودی بالاتر باشد دامنه خروجی در مقایسه با همان ورودی پایینتر خواهد شد.
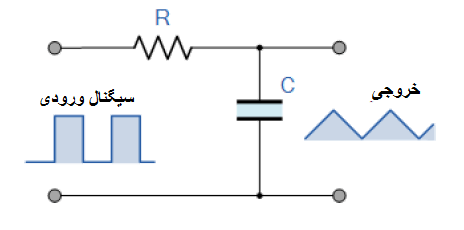
یک خروجی ولتاژ ایدهآل را برای انتگرالگیر به صورت زیر استخراج میکنیم:
تفاضل گیر RC در شکل موج های RC
تفاضلگیر یک مدار نوع فیلتر بالاگذر است که میتواند یک سیگنال ورودی موج مربعی را به موجهای فرکانس بالا در خروجی خود تبدیل کند. اگر ثابت زمانی 5RC در مقایسه با پریود زمانی شکل موج ورودی کوتاه باشد، سپس خازن قبل از تغییر بعدی در سیکل ورودی بسیار سریع کاملا شارژ خواهد شد.
زمانی که خازن کاملا شارژ شد ولتاژ خروجی دو سر مقاومت صفر است. ورود لبه پایین رونده شکل موج ورودی باعث میشود تا خازن به صورت معکوس شارژ شود که یک موج خروجی منفی میدهد سپس با تغییر ورودی موج مربعی در طول هر سیکل موج خروجی از یک مقدار مثبت تا یک مقدار منفی تغییر میکند.
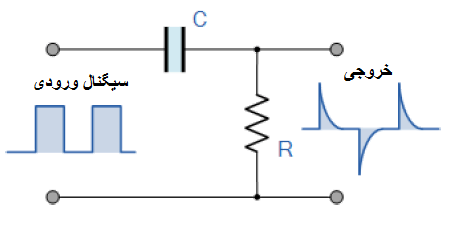
خروجی ولتاژ ایدهآل برای تفاضلگیر به صورت زیر است:
سیگنال ورودی موج سینوسی متناوب
اگر اکنون شکل موج های RC ورودی این مدارهای RC را به سیگنال ولتاژ موج سینوسی تغییر دهیم شکل موج RC خروجی حاصل بدون تغییر باقی خواهد ماند و تنها دامنه آن تحت تاثیر قرار خواهد گرفت. با تغییر موقعیتهای مقاومت R یا خازن C یک فیلتر مرتبه اول ساده پایین گذر یا بالا گذر میتواند با پاسخ فرکانسی این دو مدار وابسته بر مقدار فرکانس ورودی ساخته شود.
سیگنالهای فرکانس پایین از ورودی به خروجی با تضعیف کم یا بدون تضعیف با سیگنالهای فرکانس بالا که به صورت چشمگیر به تقریبا صفر تضعیف میشوند، میگذرند. عکس آن نیز برای یک مدار فیلتر بالا گذر صحیح است. به صورت نرمال، نقطه در جایی که پاسخ به 3dB سقوط کرده است (فرکانس قطع fc) برای تعریف پهنای باند فیلترها و یک افت 3dB متناظر برای یک کاهش در ولتاژ خروجی به 70.7 درصد مقدار اصلی به کار رفته است.
فرکانس قطع فیلتر RC
به طوریکه RC ثابت زمانی مدار از قبل تعریف شده است و میتواند با تاو T جابه جا شود. این یک مثال دیگر از چگونگی ارتباط مفهوم حوزه زمان و حوزه فرکانس است.
