ژنراتورهای شکل موج، مدارهای الکترونیکی هستند که می توانند با استفاده از نوسان سازها و مدارهای پالسی، شکل موج سینوسی، مربعی، مثلث و دندانه اره ای ایجاد کنند.
در آموزشهای قبلی، ما به طور مفصل به سه نوع مختلف مدارهای مولتی ویبراتور ترانزیستوری اساسی نگاه کرده ایم که می توانند به عنوان نوسانگرهای relaxation برای تولید یک موج مربعی یا مستطیل شکل در خروجی خود استفاده شوند تا به عنوان سیگنالهای ساعت و زمانی استفاده شوند.
فهرست مطالب
مولد شکل موج
میتوان مدارهای اساسی مولد شکل موج را از مدارهای مجتمع ساده یا تقویت کنندههای عملیاتی متصل به مدار مخزن مقاومت-خازن (RC) یا کریستال کوارتز ساخت تا شکل موج خروجی باینری یا مربع مربعی مورد نیاز را در فرکانس مورد نظر تولید کند.
این آموزش تولید شکل موج بدون چند نمونه از مدارهای سوئیچینگ احیا کننده دیجیتال ناقص است، زیرا آن هم عملکرد سوئیچینگ و هم عملکرد ژنراتورهای شکل موج بکار برده شده برای تولید امواج مربعی برای کاربرد به عنوان شکل موجهای زمانی یا متوالی را توضیح میدهد.
تولید موج مربعی
میدانیم که مدارهای سوئیچینگ احیا کننده مانند مولتی ویبراتورهای آستابل متداول ترین نوع نوسان ساز relaxation هستند زیرا یک خروجی موج مربعی ثابت ایجاد میکنند و آنها را به عنوان یک مولد شکل موج دیجیتال ایده آل میکند.
مولتی ویبراتورهای پایدار، نوسان سازهای بسیار خوبی ایجاد میکنند، زیرا آنها به طور مداوم بین دو حالت ناپایدار خود با سرعت تکرار ثابت جابجا میشوند و در نتیجه یک خروجی موج مربعی مداوم با نسبت علامت 1:1 (نسبت “روشن” و “خاموش” برابر) از خروجی خود تولید میکنند و در این آموزش به چندین روش مختلف برای ساخت ژنراتورهای شکل موج با استفاده از مدارهای منطقی استاندارد TTL و CMOS همراه با برخی از اجزای زمان بندی گسسته اضافی خواهیم پرداخت.
ژنراتورهای شکل موج اشمیت
ژنراتورهای ساده شکل موج را میتوان با استفاده از مبدلهای اساسی عملگر تریگر اشمیت مانند TTL 74LS14 ساخت. این روش تا حد زیادی ساده ترین راه برای ایجاد یک مولد اساسی شکل موج پایدار است. هنگامی که برای تولید سیگنالهای ساعت یا زمانی استفاده میشود، مولتی ویبراتور ناپایدار باید یک شکل موج پایدار ایجاد کند که به سرعت بین حالتهای “بالا” و “پایین” خود بدون هیچ گونه اعوجاج یا نویز جابجا شود و مبدل های اشمیت این کار را میکنند.
ما میدانیم که حالت خروجی مبدل اشمیت مخالف یا معکوس حالت ورودی آن است (اصول گیت NOT) و میتواند در سطوح مختلف ولتاژ تغییر حالت دهد و باعث “هیسترزیس” شود.
مبدل های اشمیت از یک عملگر تریگر اشمیت استفاده می کنند که با افزایش و کاهش سیگنال ولتاژ ورودی در مورد ترمینال ورودی، حالت بین سطح آستانه بالا و پایین را تغییر میدهد. این سطح آستانه فوقانی “تنظیم” خروجی و سطح آستانه پایین تر “تنظیم مجدد” خروجی است که به ترتیب برابر با منطق “0” و منطق “1” برای مبدل است. مدار زیر را در نظر بگیرید.
مولدهای شکل موج مبدل اشمیت
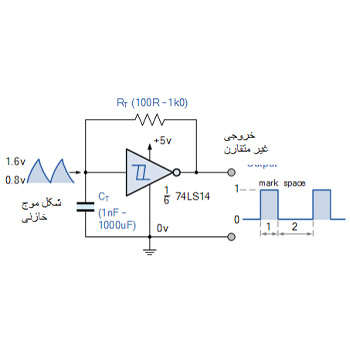
این مدار ساده مولد شکل موج از یک گیت منطقی مبدل اشمیت TTL 74LS14 با خازن C متصل شده بین ترمینال ورودی و زمین (0v) و بازخورد مثبت مورد نیاز برای نوسان مدار توسط مقاومت بازخورد R تشکیل شده است.
بنابراین چگونه کار میکند؟ فرض کنید که شارژ صفحات خازن زیر سطح آستانه پایین 0.8 ولت اشمیت باشد (مقدار صفحه داده). بنابراین این ورودی را به مبدل در یک سطح منطقی “0” و در نتیجه یک سطح خروجی منطقی “1” ایجاد میکند (اصول اصلی اینورتر).
یک طرف مقاومت R اکنون به خروجی منطق “1” (5V+) متصل است در حالی که طرف دیگر مقاومت به خازن C متصل است که در سطح منطقی “0” (0.8v یا پایین) است. خازن اکنون از طریق مقاومت با سرعت تعیین شده توسط ثابت زمانی ترکیب RC شروع به شارژ شدن میکند.
مدار تولید موج سینوسی
وقتی شارژ خازن به سطح آستانه بالای 1.6 ولت اشمیت تریگر رسید (مقدار صفحه داده) خروجی از مبدل اشمیت به سرعت از سطح منطقی “1” به حالت منطقی “0” تغییر میکند و شارش جریان درون مقاومت تغییر جهت میدهد.
این تغییر اکنون باعث میشود خازنی که در ابتدا از طریق مقاومت R شارژ میشود شروع به تخلیه مجدد از طریق همان مقاومت کند تا اینکه شارژ در صفحات خازن به سطح آستانه پایین تر از 0.8 ولت برسد و سوئیچهای خروجی مبدلها دوباره با تکرار چرخه تا زمانی که ولتاژ تغذیه وجود داشته باشد بارها و بارها خود را تکرار میکنند.
بنابراین خازن C در طول هر چرخه بین ورودی های سطح آستانه بالا و پایین ورودی اینورتر اشمیت دائماً در حال شارژ و تخلیه است که یک سطح منطقی “1” یا یک سطح منطقی “0” را در خروجی اینورتر تولید می کند. با این حال، شکل موج خروجی متقارن نیست و یک چرخه کاری در حدود 33٪ یا 3/1 تولید می کند زیرا به دلیل ویژگی های ورودی TTL معکوس کننده، نسبت علامت به فضا بین “بالا” و “پایین” به ترتیب 2: 1 است.
مقدار مقاومت بازخورد (R) نیز باید پایین و زیر 1kΩ نگه داشته شود تا مدار به درستی نوسان کند، 220R تا 470R خوب است و با تغییر مقدار خازن C مقدار فرکانس تغییر میکند. همچنین در سطح فرکانس بالا، شکل موج خروجی از شکل موج مربع شکل به شکل موج ذوزنقه ای شکل تغییر شکل میدهد زیرا ویژگیهای ورودی گیت TTL تحت تأثیر شارژ سریع و تخلیه خازن قرار میگیرد. فرکانس نوسان برای ژنراتورهای شکل موج اشمیت به این صورت است:
فرکانس شکل موج اشمیت
با مقدار مقاومت بین: R 100تا kΩ 1 و مقدار خازن بین: 1nF تا 1000uF. این محدوده فرکانسی بین 1 هرتز تا 1 مگاهرتز را ایجاد میکند (فرکانسهای بالا باعث ایجاد اعوجاج شکل موج میشوند).
به طور کلی، گیتهای منطقی استاندارد TTL خوب کار نمیکنند زیرا مولدهای شکل موج به دلیل متوسط ورودی خود و ویژگیهای خروجی، انحراف شکل موج خروجی و مقدار پایین مقاومت فیدبک مورد نیاز منجر به یک خازن مقدار بالا برای عملیات فرکانس پایین میشود.
همچنین اگر مقدار خازن بازخورد خیلی کم باشد، نوسان سازهای TTL ممکن است نوسان نداشته باشند. با این وجود، ما میتوانیم با استفاده از فناوری منطقی CMOS بهتر که از منبع تغذیه 3 ولت تا 15 ولت مانند مبدل اشمیت CMOS 40106B کار میکند، مولتی ویبراتورهای آستابل را نیز بسازیم.
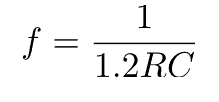
CMOS 40106 یک اینورتر ورودی منفرد با همان عملکرد اشمیت تریگر همانند TTL 74LS14 است اما دارای ایمنی نویز بسیار خوب، پهنای باند بالا، بهره زیاد و ویژگیهای ورودی/خروجی عالی برای تولید شکل موج خروجی “مربعتر” است که در زیر نشان داده شده است.
مولد شکل موج اشمیت CMOS
مدار ژنراتورهای شکل موج اشمیت برای CMOS 40106 در واقع همان مدار قبلی برای اینورتر TTL 74LS14 است، به غیر از افزودن مقاومت 10kΩ که برای جلوگیری از آسیب رساندن خازن به ترانزیستورهای ورودی حساس MOSFET استفاده میشود زیرا که آن به سرعت د فرکانسهای بالا تخلیه میشود.
نسبت علامت فضا به طور مساوی در حدود 1:1 با مقدار مقاومت بازخورد افزایش یافته به زیر 100kΩ است که منجر به یک خازن زمانی C کوچکتر و ارزان تر میشود. فرکانس نوسان ممکن است همانند: (1/1.2RC ) نباشد چون مشخصات ورودی CMOS با TTL متفاوت است. با مقدار مقاومت بین: 1kΩ و 100kΩ و مقدار خازن بین: 1pF تا 100uF این یک دامنه فرکانسی بین 0.1Hz تا 100kHz ارائه میدهد.
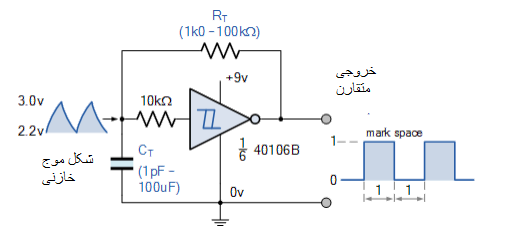
ژنراتورهای شکل موج مبدل اشمیت همچنین میتوانند از انواع گیتهای مختلف منطقی متصل شده ساخته شوند تا یک مدار مبدل را تشکیل دهند. مدار اصلی مولتی ویبراتور پایدار را میتوان به راحتی با برخی از اجزای اضافی اصلاح کرد تا خروجی یا فرکانسهای مختلف تولید کند. به عنوان مثال، دو شکل موج معکوس یا چندین فرکانس و با تغییر مقاومت بازخورد ثابت به یک پتانسیومتر میتوان فرکانس خروجی را مطابق شکل زیر تغییر داد.
مولدهای شکل موج ساعت
در اولین مدار بالا، یک مبدل اشمیت اضافی به خروجی ژنراتور شکل موج اشمیت اضافه شده است تا شکل موج دوم را ایجاد کند که عکس معکوس یا آینه ای است که از دو شکل موج خروجی مکمل تولید می بنابراین وقتی یک خروجی “بالا” است مورد دیگر “پایین” است. این اینورتر دوم اشمیت نیز شکل شکل موج خروجی معکوس را بهبود میبخشد اما یک “تاخیر گیت” کوچک به آن اضافه میکند، بنابراین دقیقاً با اولین هماهنگ نیست.
همچنین، میتوان فرکانس خروجی مدار نوسان ساز را با تغییر مقاومت ثابت R به یک پتانسیومتر تغییر داد، اما برای جلوگیری از کوتاه شدن پتانسیومتر در اینورتر در حالی که حداقل مقدار 0Ω است، هنوز یک مقاومت بازخورد کوچکتر لازم است.
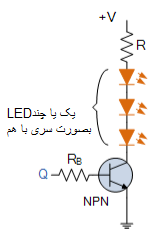 ما همچنین میتوانیم از دو خروجی مکمل Q و Q¯ مدار اول استفاده کنیم تا به طور متناوب دو مجموعه چراغ یا LED را با اتصال خروجیهای آنها به طور مستقیم به پایههای دو ترانزیستور سوئیچینگ همانطور که نشان داده شده، چشمک زن کنیم.
ما همچنین میتوانیم از دو خروجی مکمل Q و Q¯ مدار اول استفاده کنیم تا به طور متناوب دو مجموعه چراغ یا LED را با اتصال خروجیهای آنها به طور مستقیم به پایههای دو ترانزیستور سوئیچینگ همانطور که نشان داده شده، چشمک زن کنیم.
به این ترتیب یک یا چند LED به طور سری با جمع کننده ترانزیستورهای سوئیچینگ به هم متصل میشوند و در نتیجه هر یک از ترانزیستورها به نوبه خود “روشن” میشوند و در هر مجموعه از LED ها چشمک میزند.
همچنین هنگام استفاده از این نوع مدارها، به یاد داشته باشید که یک مقاومت سری مناسب R برای محاسبه جریان LED به زیر (قرمز20mA (LED برای ولتاژ استفاده کنید.
به منظور تولید یک فرکانس بسیار کم از هرتز برای چشمک LED ها، ژنراتورهای شکل موج اشمیت از خازن های زمانی با ارزش بالا استفاده میکنند که خود میتوانند از نظر فیزیکی بزرگ و گران قیمت باشند.
مدار تولید فرکانس
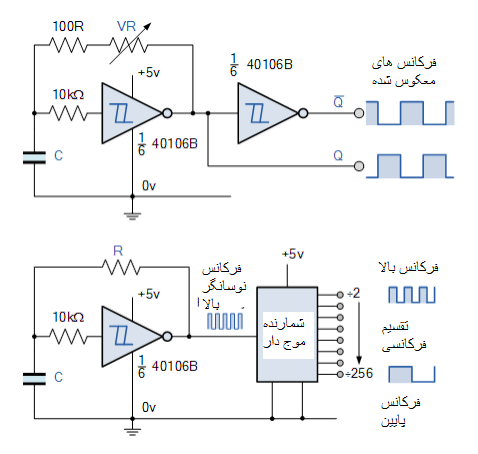
یک راه حل جایگزین این است که از خازن مقدار کمتری برای تولید فرکانس بسیار بالاتر مثلاً 1 کیلوهرتز یا 10 کیلوهرتز استفاده کرد و سپس این فرکانس اصلی را به فرکانسهای کوچکتر تقسیم کرد تا مقدار فرکانس پایین لازم حاصل شود و مدار دوم فوق فقط همین را انجام میدهد.
مدار پایین در بالا نوسان ساز را نشان میدهد که برای هدایت ورودی ساعت شمارنده موج دار استفاده میشود. شمارنده های موجدار اساساً تعدادی فلیپ فلاپ تقسیم بر 2 و نوع D هستند که با هم جمع میشوند تا یک شمارنده تقسیم بر N را ایجاد کنند بطویکه N برابر است با شمارندههای بیت شمارنده مانند CMOS 4024 7 بیتی شمارنده موج دار یا شمارنده 12 بیتی موج دار شمارنده CMOS 4040.
فرکانس ساعت ثابت تولید شده توسط مدار پالس ساعت پایدار اشمیت به تعدادی از فرکانسهای مختلف مانند ، ƒ ÷ 2 ، ƒ ÷ 4 ، ƒ ÷ 8 ، ƒ ÷ 256 و غیره تا حداکثر “تقسیم- بر n”شمارنده موجدار مورد استفاده تقسیم میشود. این فرایند استفاده از “فلیپ فلاپ ها” ، ” شمارندههای دودویی” یا “شمارندههای موجی” برای تقسیم فرکانس اصلی ساعت ثابت به فرکانس های مختلف فرعی به عنوان بخش فرکانس شناخته می شود و می توانیم از آن برای بدست آوردن تعدادی مقادیر فرکانس از یک مولد تک شکل موج استفاده کرد.
ژنراتورهای شکل موج گیت NAND
ژنراتورهای شکلات موج اشمت را می توان با استفاده از استاندارد گیت های CMOS منطقی NAND متصل برای تولید مدار اینورتر نیز ساخت. در اینجا، دو گیت NAND به یکدیگر متصل شده اند تا نوع دیگری از مدار نوسان ساز آرامش RC را تولید کنند که شکل موج خروجی به شکل یک موج مربعی میشود، که در زیر نشان داده شده است.
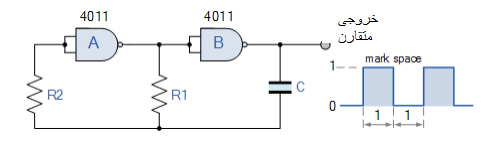
در این نوع مدارهای مولد شکل موج، شبکه RC از مقاومت R1 و خازن C تشکیل میشود، با این شبکه RC توسط خروجی اولین گیت NAND کنترل میشود. خروجی از این شبکه R1C از طریق مقاومت R2 به ورودی اولین گیت NAND باز میگردد و هنگامی که ولتاژ شارژ خازن به سطح آستانه بالای گیت NAND اول می رسد، گیت NAND تغییر وضعیت میدهد و باعث ایجاد گیت NAND دوم میشود به دنبال آن، در نتیجه تغییر حالت و ایجاد تغییر در سطح خروجی میشود.
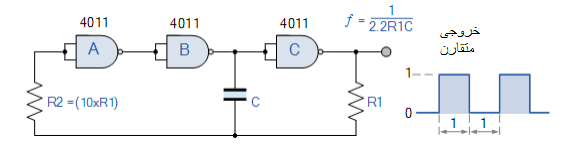
ولتاژ شبکه R1C اکنون معکوس شده و خازن شروع به تخلیه از طریق مقاومت تا زمانی که به سطح آستانه پایین اولین گیت NAND برسد می کند و باعث می شود دو گیت بار دیگر تغییر حالت دهند. مانند مدار قبلی مولدهای شکل موج اشمیت در بالا، فرکانس نوسان توسط ثابت زمانی R1C تعیین میشود که به صورت زیر داده می شود: 1/2.2R1C . به طور کلی به R2 مقداری داده میشود که 10 برابر مقدار مقاومت R1 است.
در صورت نیاز به پایداری بالا یا خود راه اندازی تضمینی، می توان ژنراتورهای شکل موج CMOS را با استفاده از سه گیت معکوس NAND یا هر سه مبدل منطقی برای این ماهیت، بهم متصل کرد، که در زیر نشان داده شده است که مداری تولید میشود که گاهی اوقات ژنراتور شکل موج “حلقه سه” نامیده می شود . فرکانس نوسان دوباره با ثابت زمانی R1C تعیین میشود، همانند دو نوسانگر دو گیت بالا هنگامی که R2 مقداری برابر با 10 برابر مقاومت R1 داشته باشد، این به صورت روبرو ارائه می شود: 1/2.2R1C .
مولد شکل موج گیت NAND پایدار
اضافه شدن گیت اضافی NAND تضمین میکند که اسیلاتور حتی با مقادیر خازن بسیار کم نیز شروع شود. همچنین پایداری ژنراتور شکل موج بسیار بهبود مییابد زیرا به دلیل سطح تحریک آستانه آن که تقریباً نیمی از ولتاژ تغذیه است، کمتر در معرض تغییرات منبع تغذیه است.
مقدار ثبات عمدتا توسط فرکانس نوسان تعیین میشود و به طور کلی، هرچه فرکانس پایینتر باشد، نوسانگر پایدارتر میشود.
از آنجا که این نوع ژنراتور شکل موج تقریباً در نیمی یا 50٪ ولتاژ تغذیه کار میکند، شکل موج خروجی حاصل تقریباً 50٪ چرخه کاری، نسبت علامت 1:1 به فضا دارد. ژنراتور شکل موج سه گیت دارای مزایای زیادی نسبت به نوسانگر دو گیتی قبلی فوق است اما یک نقطه ضعف بزرگ آن استفاده از یک گیت منطقی اضافی است.
ژنراتور شکل موج نوع حلقه
در بالا مشاهده کردیم که میتوان مولدهای شکل موج را با استفاده از هر دو TTL و فناوری منطقی بهتر CMOS با یک شبکه RC تولید کرد که هنگام اتصال به یک یا دو یا حتی سه گیت منطقی، یک تاخیر زمانی را در مدار ایجاد میکند تا یک نوسانگر آرامش RC ساده ایجاد کند. اما ما همچنین میتوانیم ژنراتورهای شکل موج را فقط با استفاده از گیتهای منطقی NOT یا به عبارتی مبدل بدون هیچگونه اجزای غیرفعال اضافی متصل به آنها بسازیم.
با اتصال هر شماره فرد، (3, 5, 7, 9) از گیت NOT برای ایجاد یک مدار “حلقه” ، به طوری که خروجی حلقه مستقیماً به ورودی حلقه متصل شود، مدار همچنان در نوسان است به عنوان یک سطح منطقی، “1” به طور مداوم در اطراف شبکه می چرخد و یک فرکانس خروجی تولید می کند که با تاخیر انتشار مبدل های استفاده شده تعیین میشود.
مبدل شکل موج حلقه ای
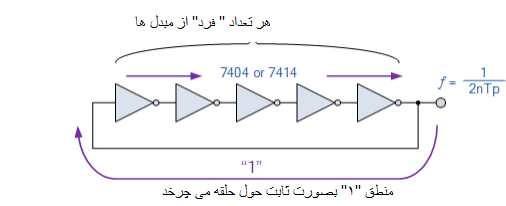
فرکانس نوسان توسط تاخیر انتشار کل مبدل های استفاده شده در داخل حلقه تعیین می شود و این خود توسط نوع فناوری گیت، TTL ، CMOS ، BiCMOS که اینورتر از آن ساخته شده است، تعیین می شود. تاخیر انتشار یا زمان انتشار، کل زمان مورد نیاز (معمولاً در نانوثانیه) برای عبور مستقیم سیگنال از مبدل از یک منطق “0” که به ورودی آن می رسد تا منطق “1” را در خروجی خود تولید کند، است.
همچنین برای این نوع تغییرات مدار تولید کننده شکل موج حلقه در ولتاژ تغذیه ، دما و ظرفیت خازن وظرفیت بار همه تأخیر انتشار دروازه های منطقی را تحت تأثیر قرار می دهند. به طور کلی زمان تأخیر انتشار متوسط در برگه اطلاعات تولید کنندگان برای نوع گیتهای منطقی دیجیتالی مورد استفاده با فرکانس نوسان بصورت زیر است:
بطوریکه: ƒفرکانس نوسان است، n تعداد گیتهای استفاده شده و Tp تاخیر انتشار برای هر گیت است.
به عنوان مثال، فرض کنید که یک مدار مولد شکل موج ساده دارای 5 مبدل منفرد متصل به هم است و یک اسیلاتور حلقه را تشکیل میدهد، تاخیر انتشار برای هر اینورتر به صورت 8n در نظر گرفته شده است. سپس فرکانس نوسان به صورت زیر داده می شود:

البته، این واقعاً به دلیل ناپایداری و فرکانس نوسان بسیار زیاد، 10 مگا هرتز بسته به نوع فناوری گیت منطقی استفاده شده، یک نوسان ساز عملی نیست و در مثال ساده ما 12.5 مگاهرتز محاسبه شده است. فرکانس خروجی اسیلاتور حلقه را می توان با تغییر تعداد اینورترهای استفاده شده در حلقه کمی “تنظیم” کرد ، اما بهتر است از یک مولد شکل موج RC با ثبات تر مانند مواردی که در بالا بحث کردیم استفاده شود.
با این وجود، این نشان میدهد که گیتهای منطقی میتوانند به یکدیگر متصل شوند و مولدهای شکل موج منطقی را تولید کنند و مدارهای دیجیتالی بد طراحی شده با تعداد زیادی گیت، مسیرهای سیگنال و حلقههای بازخورد به طور ناخواسته نوسان میکنند.
با استفاده از یک شبکه RC در مدار اینورتر، می توان فرکانس نوسان را به طور دقیق کنترل کرد و یک مدار نوسان ساز آرامش آرام تر را برای استفاده در بسیاری از برنامه های الکترونیکی عمومی ایجاد میکند.
در آموزش بعدی در مورد شکل موج ها و مولدهای شکل موج، تایمر 555 را مورد بررسی قرار میدهیم که یکی از محبوب ترین و همه کاره ترین مدارهای مجتمع تولید شده است که می تواند طیف گسترده ای از شکل موج های مختلف و سیگنال های زمانی را از مولتی ویبراتورهای ثابت و پایدار تولید کند.
